在 Linux 系统编程中,非阻塞 I/O 是一种编程模型,它允许程序在执行 I/O 操作时不被阻塞。相比于传统的阻塞 I/O 模型,在非阻塞 I/O 模型中,I/O 操作会立即返回,而不需要等待 I/O 操作完成。这使得程序可以同时处理多个 I/O 操作或者执行其他计算任务,提高了程序的并发性能。
在 Linux 中,可以使用 fcntl 系统调用或者使用套接字选项来设置非阻塞 I/O。通过将文件描述符设置为非阻塞模式,当读写操作无法立即完成时,系统调用会立即返回一个错误码,而不是一直等待直到操作完成。程序可以根据错误码判断是否需要重新尝试 I/O 操作,或者切换到处理其他任务。
需要注意的是,在非阻塞 I/O 模型中,应用程序需要不断轮询文件描述符,以便及时发现 I/O 操作的完成。可以使用轮询函数(如 select、poll、epoll)来实现这一点。同时,由于非阻塞 I/O 模型中涉及到并发访问文件描述符,因此需要考虑线程安全等问题。
总的来说,非阻塞 I/O 是 Linux 系统编程中常用的一种编程模型,它可以提高程序的并发性能,但也需要程序员考虑一些额外的问题。
复制文件描述符:cmd 取值为 F_DUPFD,arg 为目标文件描述符的最小值,表示将 fd 复制到一个新的文件描述符,该文件描述符的值不小于 arg。
获取/设置文件描述符标记:cmd 取值为 F_GETFD/F_SETFD,arg 为要获取/设置的标记。标记可以是 FD_CLOEXEC(表示在调用 exec 系列函数时关闭文件描述符)、FD_NONBLOCK(表示将文件描述符设置为非阻塞模式)等。
获取/设置文件状态标志:cmd 取值为 F_GETFL/F_SETFL,arg 为要获取/设置的状态标志。状态标志可以是 O_NONBLOCK(与 FD_NONBLOCK 作用相同)、O_APPEND(表示在写入文件时追加而不是覆盖)等。
获取/设置记录锁:cmd 取值为 F_GETLK/F_SETLK/F_SETLKW,arg 为要获取/设置的锁结构体。锁结构体包含锁的起始偏移量、长度、锁的类型等信息。
#include <unistd.h>
#include <fcntl.h>
int fcntl(int fd, int cmd, ... /* arg */ );实现
>--read--->(buf)>---write-->
FSM1
(tty1) (tty2)
FSM2
<--write--<(buf)<---read---<代码样例
#include <iostream>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string>
#include <unistd.h>
#include <errno.h>
#define TTY1 "/dev/tty2"
#define TTY2 "/dev/tty3"
#define BUFFSIZE 1024
using namespace std;
// 状态机状态
enum
{
STATE_R = 1, // 读态
STATE_W, // 写态
STATE_EX,
STATE_T // 终止状态
};
// 有限状态机
struct fdm_t
{
int state;
int sfd;
int dfd;
int len;
int pos;
string str;
char buf[BUFFSIZE];
};
void fsm_driver(struct fdm_t *fsm)
{
int res;
// 从源写到目标
switch (fsm->state)
{
case STATE_R: // 读
fsm->len = read(fsm->sfd, fsm->buf, BUFFSIZE);
if (fsm->len == 0)
{
fsm->state = STATE_T; // 结束
}
else if (fsm->len < 0)
{
if (errno == EAGAIN) // 非阻塞读失败
{
fsm->state = STATE_R;
}
else // 真错
{
fsm->str = "读出错";
fsm->state = STATE_EX; // 结束
}
}
else // 下一步前往写状态
{
fsm->state = STATE_W;
fsm->pos = 0;
}
break;
case STATE_W: // 写
res = write(fsm->dfd, (fsm->buf + fsm->pos), fsm->len);
if (res < 0)
{
if (errno == EAGAIN)
{
fsm->state = STATE_W;
}
else
{
fsm->str = "写出错";
fsm->state = STATE_EX; // 写出错
}
}
else
{
fsm->len -= res;
fsm->pos += res;
if (fsm->len == 0) // 写完了
{
fsm->state = STATE_R; // 去读
}
else // 没写完
{
fsm->state = STATE_W; // 仍旧去写
}
}
break;
case STATE_EX: // 写出错
cerr << fsm->str << endl;
fsm->state = STATE_T;
break;
case STATE_T: // 结束
break;
default:
break;
}
}
void relay(int fd1, int fd2)
{
// 将两个文件描述符改为以非阻塞打开
int fd1_save = fcntl(fd1, F_GETFL);
int fd2_save = fcntl(fd2, F_GETFL);
int res1 = fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
int res2 = fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
cout << "设置非阻塞成功 " << res1 << " " << res2 << endl;
struct fdm_t fsm1, fsm2;
fsm1.state = STATE_R;
fsm1.sfd = fd1; // 源
fsm1.dfd = fd2; // 目标
fsm2.state = STATE_R;
fsm2.sfd = fd2;
fsm2.dfd = fd1;
// fsm1
// fd1----buf---->fd2
// fsm2
// fd2----buf---->fd1
while (fsm1.state != STATE_T || fsm2.state != STATE_T)
{
fsm_driver(&fsm1);
fsm_driver(&fsm2);
}
// 恢复原来文件状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
}
int main(int argc, char **argv)
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK);
if (fd2 == -1)
{
cerr << "fd2 open() error" << endl;
}
relay(fd1, fd2);
close(fd1);
close(fd2);
return 0;
}Linux 系统编程中的 IO 多路复用技术可以帮助解决以下问题:
同时处理多个 I/O 事件:在传统的阻塞式 I/O 模型中,每个 I/O 操作都会阻塞进程,只有当 I/O 操作完成后,进程才会继续执行。这种模型在同时处理多个 I/O 事件时效率很低。而 IO 多路复用可以同时监听多个 I/O 事件,当任意一个 I/O 事件就绪时,进程可以及时处理,从而提高了系统的并发处理能力。
避免无限循环等待:在传统的非阻塞式 I/O 模型中,如果一个文件描述符没有数据可读,进程会不断地轮询,这会浪费 CPU 资源。而 IO 多路复用通过监听多个文件描述符,可以有效避免无限循环等待的问题。
节省资源:在传统的多线程模型中,每个线程都需要占用一定的内存和 CPU 资源。而 IO 多路复用可以在一个线程内同时处理多个 I/O 事件,从而节省了系统资源,提高了系统的性能。
select 函数是 Linux 系统编程中常用的一种 I/O 多路复用机制,它可以让程序同时监听多个文件描述符,一旦其中任何一个文件描述符有数据可读或可写,就会通知程序进行相应的处理。
函数原型
/* According to POSIX.1-2001, POSIX.1-2008 */
#include <sys/select.h>
/* According to earlier standards */
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
int select(int nfds, fd_set *readfds, fd_set *writefds,
fd_set *exceptfds, struct timeval *timeout);
//该函数的返回值是就绪的文件描述符数量,当set全为null时设置timeout可以被用作安全休眠返回值为0
struct timeval {
long tv_sec; /* seconds */
long tv_usec; /* microseconds */
};
/*
nfds:要监听的最大文件描述符值加1。
readfds:读文件描述符集合。
writefds:写文件描述符集合。
exceptfds:异常文件描述符集合。
timeout:超时时间。
*/监听集合操作
//从set中删除fd
void FD_CLR(int fd, fd_set *set);
//判断fd是否在set中
int FD_ISSET(int fd, fd_set *set);
//将fd加入到set中
void FD_SET(int fd, fd_set *set);
//清空set
void FD_ZERO(fd_set *set);将数据中继实例改为 select 版本
#include <iostream>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/time.h>
#include <sys/select.h>
#include <fcntl.h>
#include <string>
#include <unistd.h>
#include <errno.h>
#define TTY1 "./temp1.o"
#define TTY2 "./temp2.o"
#define BUFFSIZE 1024
using namespace std;
// 状态机状态
enum
{
STATE_R = 1, // 读态
STATE_W, // 写态
STATE_EX,
STATE_T // 终止状态
};
// 有限状态机
struct fdm_t
{
int state;
int sfd;
int dfd;
int len;
int pos;
string str;
char buf[BUFFSIZE];
};
void fsm_driver(struct fdm_t *fsm)
{
int res;
// 从源写到目标
switch (fsm->state)
{
case STATE_R: // 读
fsm->len = read(fsm->sfd, fsm->buf, BUFFSIZE);
if (fsm->len == 0)
{
fsm->state = STATE_T; // 结束
}
else if (fsm->len < 0)
{
if (errno == EAGAIN) // 非阻塞读失败
{
fsm->state = STATE_R;
}
else // 真错
{
fsm->str = "读出错";
fsm->state = STATE_EX; // 结束
}
}
else // 下一步前往写状态
{
fsm->state = STATE_W;
fsm->pos = 0;
}
break;
case STATE_W: // 写
res = write(fsm->dfd, (fsm->buf + fsm->pos), fsm->len);
if (res < 0)
{
if (errno == EAGAIN)
{
fsm->state = STATE_W;
}
else
{
fsm->str = "写出错";
fsm->state = STATE_EX; // 写出错
}
}
else
{
fsm->len -= res;
fsm->pos += res;
if (fsm->len == 0) // 写完了
{
fsm->state = STATE_R; // 去读
}
else // 没写完
{
fsm->state = STATE_W; // 仍旧去写
}
}
break;
case STATE_EX: // 写出错
cerr << fsm->str << endl;
fsm->state = STATE_T;
break;
case STATE_T: // 结束
break;
default:
break;
}
}
void relay(int fd1, int fd2)
{
// 将两个文件描述符改为以非阻塞打开
int fd1_save = fcntl(fd1, F_GETFL);
int fd2_save = fcntl(fd2, F_GETFL);
int res1 = fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
int res2 = fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
cout << "设置非阻塞成功 " << res1 << " " << res2 << endl;
struct fdm_t fsm1, fsm2;
fd_set rset, wset, eset;
fsm1.state = STATE_R;
fsm1.sfd = fd1; // 源
fsm1.dfd = fd2; // 目标
fsm2.state = STATE_R;
fsm2.sfd = fd2;
fsm2.dfd = fd1;
// fsm1
// fd1----buf---->fd2
// fsm2
// fd2----buf---->fd1
while (fsm1.state != STATE_T || fsm2.state != STATE_T)
{
// 布置监视任务
FD_ZERO(&rset);
FD_ZERO(&wset);
FD_ZERO(&eset);
if (fsm1.state == STATE_R)
{
FD_SET(fsm1.sfd, &rset);
FD_SET(fsm1.sfd, &eset);
}
else if (fsm1.state == STATE_W)
{
FD_SET(fsm1.dfd, &wset);
FD_SET(fsm1.dfd, &eset);
}
if (fsm2.state == STATE_R)
{
FD_SET(fsm2.sfd, &rset);
FD_SET(fsm2.sfd, &eset);
}
else if (fsm2.state == STATE_W)
{
FD_SET(fsm2.dfd, &wset);
FD_SET(fsm2.dfd, &eset);
}
// 监视
int select_res; // 状态机为W R状态时才进行select监听
if (fsm1.state < STATE_EX && fsm2.state < STATE_EX && (select_res = select(std::max(fsm1.sfd, fsm1.dfd) + 1, &rset, &wset, &eset, nullptr)) < 0)
{
if (errno == EINTR) // 被信号打断
{
continue; // 重新监视
}
cerr << "select error" << endl;
break;
}
// 监视结果
if (FD_ISSET(fsm1.sfd, &eset) || FD_ISSET(fsm1.dfd, &eset))
{
cerr << "fd in eset" << endl;
fsm1.state = STATE_EX;
fsm2.state = STATE_EX;
}
if (fsm1.state >= STATE_EX || FD_ISSET(fsm1.sfd, &rset) || FD_ISSET(fsm2.dfd, &wset))
{
fsm_driver(&fsm1);
}
if (fsm2.state >= STATE_EX || FD_ISSET(fsm2.sfd, &rset) || FD_ISSET(fsm1.dfd, &wset))
{
fsm_driver(&fsm2);
}
}
// 恢复原来文件状态
fcntl(fd1, F_SETFL, fd1_save);
fcntl(fd2, F_SETFL, fd2_save);
}
int main(int argc, char **argv)
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR | O_CREAT);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK | O_CREAT);
if (fd2 == -1)
{
cerr << "fd2 open() error" << endl;
}
relay(fd1, fd2);
close(fd1);
close(fd2);
return 0;
}函数原型
#include <sys/select.h>
int pselect(int nfds, fd_set *readfds, fd_set *writefds,
fd_set *exceptfds, const struct timespec *timeout,
const sigset_t *sigmask);
//pselect提供信号屏蔽,可以在pselect前进行信号屏蔽,在阻塞pselect时使用sigmask指定的信号屏蔽,pselect返回后恢复原来的信号屏蔽
struct timespec {
long tv_sec; /* seconds */
long tv_nsec; /* nanoseconds */
};在 Linux 系统中,select 函数能够监听的文件描述符数量是有限制的,具体的限制取决于操作系统实现和内存限制.
在早期的 Linux 内核中,select 函数可以监听的最大文件描述符数量是 1024,这是由文件描述符集合的数据结构实现决定的。文件描述符集合通常是一个位图,位图中的每一位表示一个文件描述符,因此,一个 32 位的整数可以表示 32 个文件描述符。因此,文件描述符集合通常的实现是一个数组,数组中的每个元素都是一个 32 位的整数,能够表示 32 个文件描述符。
在早期的 Unix 系统中,文件描述符集合通常是一个长度为 32 的数组,能够监听的最大文件描述符数量就是 32 * 32 = 1024
随着 Linux 内核的不断升级和优化,select 函数可以监听的最大文件描述符数量已经得到了很大的提高,例如在现代的 Linux 内核中,可以通过修改 FD_SETSIZE 宏定义来扩大文件描述符集合的大小,从而提高 select 函数能够监听的最大文件描述符数量。通常,FD_SETSIZE 宏定义的默认值是 1024 或者更大,可以在编译时通过修改宏定义的方式来改变文件描述符集合的大小。
总的来说,select 函数能够监听的最大文件描述符数量是有限制的,但可以通过修改操作系统配置和内存限制来提高其能力。另外,随着 I/O 多路复用技术的发展和操作系统内核的优化,还有其他更高效的 I/O 多路复用机制可以用来替代 select 函数,例如 poll、epoll 等,它们可以更加高效地处理大量的文件描述符。
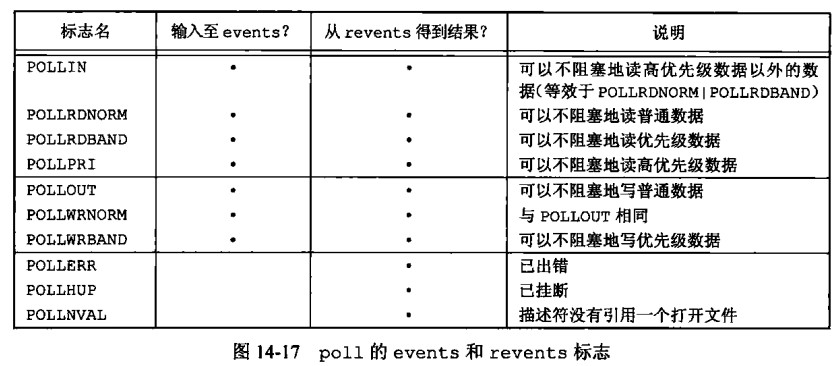
poll 函数是 Linux 系统中用于 I/O 多路复用的一种机制,可以同时监视多个文件描述符的读写事件,从而避免了使用多个线程或进程来处理大量的 I/O 操作。
函数原型
#include <poll.h>
int poll(struct pollfd *fds, nfds_t nfds, int timeout);//timeout ms
// fds:为结构体数组指针
// nfs:为数组的长度
// timeout < 0:poll函数一直阻塞,直到有事件发生。
// timeout == 0:poll函数立即返回,不阻塞,用于查询所有监视的文件描述符的状态。
// timeout > 0:poll函数等待timeout毫秒后返回,即使没有事件发生。
struct pollfd {
int fd; /* file descriptor 要监视的文件描述符 */
short events; /* requested events 要监视的事件类型*/
short revents; /* returned events 实际发生的事件类型*/
};关于 event 的选项
简单使用样例
#include <iostream>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/time.h>
#include <fcntl.h>
#include <string>
#include <unistd.h>
#include <poll.h>
#include <errno.h>
#define TTY1 "./temp1.o"
#define TTY2 "./temp2.o"
#define MAX 1024
using namespace std;
int main(int argc, char **argv)
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR | O_CREAT);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK | O_CREAT);
if (fd2 == -1)
{
cerr << "fd2 open() error" << endl;
}
{ // 非阻塞设置
int fd1_save = fcntl(fd1, F_GETFL);
int fd2_save = fcntl(fd2, F_GETFL);
int res1 = fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
int res2 = fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
cout << "设置非阻塞成功 " << res1 << " " << res2 << endl;
}
// poll使用
struct pollfd pfds[MAX];
// 数组初始化
for (int i = 0; i < MAX; i++)
{
pfds[i].fd = -1;
}
pfds[0].fd = fd1;
pfds[0].events = 0;
pfds[0].events = POLLIN | POLLOUT;
pfds[1].fd = fd2;
pfds[1].events = 0;
pfds[1].events = POLLIN | POLLOUT;
// poll监听
int res;
while (1)
{
if ((res = poll(pfds, 2, -1)) < 0)
{
if (errno == EINTR)
{
continue;
}
break;
}
for (int i = 0; i < MAX; i++)
{
if (pfds[i].fd != -1)
{
if (pfds[i].revents & POLLIN)
{
cout << pfds[i].fd << "可读" << endl;
// 进行非阻塞IO相关操作
}
if (pfds[i].revents & POLLOUT)
{
cout << pfds[i].fd << "可写" << endl;
// 进行非阻塞IO相关操作
}
}
}
}
// poll返回0表示超时 -1表示错误
// 调用poll后pfds数组不会被清空
close(fd1);
close(fd2);
return 0;
}相对于 select 函数,poll 函数的优点在于能够监听更多的文件描述符,并且对于大量文件描述符的情况下效率更高,因为 poll 函数不需要轮询所有文件描述符,而是使用内核事件通知机制来实现。另外,poll 函数还支持更细粒度的事件类型,例如 POLLPRI 表示有紧急数据可读,这是 select 函数不支持的。
select 是以事件组织描述符,得事件->检测描述符
poll 是以描述符组织事件,得描述符->判断事件
函数原型
#define _GNU_SOURCE /* See feature_test_macros(7) */
#include <signal.h>
#include <poll.h>
int ppoll(struct pollfd *fds, nfds_t nfds,
const struct timespec *tmo_p, const sigset_t *sigmask);函数原型
参数 size 指定了创建的 epoll 实例中能够同时处理的文件描述符的数量,这个值并不是实际限制,而只是一个提示,内核会根据系统的实际情况调整这个值。当 size 被设置为 0 时,epoll_create 函数会自动选择一个合适的值。
函数返回一个文件描述符,如果创建失败,则返回-1,并设置 errno 为相应的错误码。
在使用 epoll 前,必须先调用 epoll_create 创建一个 epoll 实例,并将返回的文件描述符保存下来,以便后续的操作。每个 epoll 实例在内核中都有一个相应的事件表,用于存储所有注册在该 epoll 实例中的文件描述符及其对应的事件。
#include <sys/epoll.h>
int epoll_create(int size);int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event);
/*op:
EPOLL_CTL_ADD 将文件描述符fd添加到epoll实例中,event参数指定了fd关注的事件类型。
EPOLL_CTL_MOD 修改文件描述符fd在epoll实例中的关注事件,event参数指定了修改后的事件类型。
EPOLL_CTL_DEL 将文件描述符fd从epoll实例中删除。
*/
//参数event是一个指向epoll_event结构体的指针,
//该结构体用于指定文件描述符关注的事件类型,它的定义如下:
struct epoll_event {
uint32_t events; /* 关注的事件类型 */
epoll_data_t data; /* 用户数据 */
};
/*events成员表示关注的事件类型,可以是以下值的组合:
EPOLLIN:可读事件。
EPOLLOUT:可写事件。
EPOLLRDHUP:TCP连接被对端关闭,或者对端关闭了写操作。
EPOLLERR:错误事件。
EPOLLHUP:挂起事件,通常是由于连接重置或者文件描述符被关闭导致的。*/
//data成员是一个epoll_data_t类型的联合体,
//用于存储与文件描述符相关的用户数据,它的定义如下:
typedef union epoll_data {
void *ptr;
int fd;
uint32_t u32;
uint64_t u64;
} epoll_data_t;epoll_ctl 函数注意事项
1、要添加或删除的文件描述符必须是已经打开的、合法的文件描述符。 2、在将文件描述符添加到 epoll 实例中之前,需要先将其设置为非阻塞模式。 3、event 参数中的 events 成员应该是需要关注的事件类型的组合,例如,如果希望关注可读事件和挂起事件,则可以设置 events 成员为 EPOLLIN | EPOLLHUP。
int epoll_wait(int epfd, struct epoll_event *events,
int maxevents, int timeout);
int epoll_pwait(int epfd, struct epoll_event *events,
int maxevents, int timeout,
const sigset_t *sigmask);简单样例
#include <iostream>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/time.h>
#include <fcntl.h>
#include <string>
#include <unistd.h>
#include <sys/epoll.h>
#include <errno.h>
#define TTY1 "./temp1.o"
#define TTY2 "./temp2.o"
#define MAX 1024
using namespace std;
int main(int argc, char **argv)
{
int fd1, fd2;
fd1 = open(TTY1, O_RDWR | O_CREAT);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
}
fd2 = open(TTY2, O_RDWR | O_NONBLOCK | O_CREAT);
if (fd2 == -1)
{
cerr << "fd2 open() error" << endl;
}
{ // 非阻塞设置
int fd1_save = fcntl(fd1, F_GETFL);
int fd2_save = fcntl(fd2, F_GETFL);
int res1 = fcntl(fd1, F_SETFL, fd1_save | O_NONBLOCK);
int res2 = fcntl(fd2, F_SETFL, fd2_save | O_NONBLOCK);
cout << "设置非阻塞成功 " << res1 << " " << res2 << endl;
}
// epoll
int epfd = epoll_create(2);
if (epfd < 0)
{
cerr << "epoll create error" << endl;
exit(1);
}
struct epoll_event ev, events[1024];
ev.events = EPOLLIN | EPOLLET; // ET模式
ev.data.fd = fd1;
epoll_ctl(epfd, EPOLL_CTL_ADD, fd1, &ev);
ev.events = EPOLLOUT;
ev.data.fd = fd2;
epoll_ctl(epfd, EPOLL_CTL_ADD, fd2, &ev);
// 添加监听事项
int ret;
while (1)
{
if ((ret = epoll_wait(epfd, events, 1024, -1)) < 0)
{
if (errno == EINTR)
{
continue;
}
break;
}
else
{
for (int i = 0; i < ret; i++) // 遍历就绪集合
{
int fd = events[i].data.fd;
if (fd == fd1)
{
if (events[i].events & EPOLLIN)
{
cout << fd << "EPOLLIN" << endl;
// epoll_ctl...
}
else if (events[i].events & EPOLLOUT)
{
cout << fd << "EPOLLOUT" << endl;
// epoll_ctl...
}
}
else if (fd == fd2)
{
if (events[i].events & EPOLLIN)
{
cout << fd << "EPOLLIN" << endl;
// epoll_ctl...
}
else if (events[i].events & EPOLLOUT)
{
cout << fd << "EPOLLOUT" << endl;
// epoll_ctl...
}
}
}
}
}
close(fd1);
close(fd2);
return 0;
}
// fd1 的 EPOLLIN只会触发一次 因为是EPOLLET模式
// fd2 的 EPOLLOUT会一直触发I/O 触发方式
水平触发 LT,当一个文件描述符就绪时,会不断地通知应用程序,直到应用程序处理完这个文件描述符上的所有可读或可写数据。这种事件通知机制比较简单,但当文件描述符数量较大时,效率会有所下降。
边缘触发 ET,当一个文件描述符从未就绪变为就绪时,才会通知应用程序。这种事件通知机制能够有效减少通知次数,提高效率。ET 模式需要使用系统调用(如 read、write、recv、send 等)来处理所有可读或可写数据,否则可能会导致缓冲区中剩余的数据未能被处理。
单次触发 EPOLLONESHOT,可以在文件描述符就绪后只通知一次,需要应用程序再次调用 epoll_ctl 函数来重新将该文件描述符加入监听队列。
使用 ET 要注意的点
1、ET 模式下,每个就绪事件只会通知一次,如果应用程序没有及时处理,可能会造成事件丢失。 2、ET 模式下,应用程序需要读取所有可读或可写数据,直到 read 或 write 等系统调用返回 EAGAIN 或 EWOULDBLOCK,否则可能会导致阻塞或者缓冲区溢出。 3、ET 模式通常适用于大量连接、高并发的场景,可以减少通知次数,提高效率。
| select | poll | epoll | |
|---|---|---|---|
| 操作方式 | 遍历 | 遍历 | 回调 |
| 底层实现 | 数组 | 链表 | 红黑树 |
| IO 效率 | 每次调用进行线性遍历 O(n) | 每次调用进行线性遍历 O(n) | 事件通知方式,每当 fd 就绪,系统注册的回调函数就会被调用,将就绪 fd 放到 rdllist 中,事件复杂度为 O(1) |
| 最大连接数 | 1024(x86)或 2048(x64) | 无上限 | 无上限 |
| fd 拷贝 | 每次调用,都需要把 fd 集合从用户态拷贝到内核态 | 每次调用,都需要把 fd 集合从用户态拷贝到内核态 | 调用 epoll_ctl 时拷贝进内核并保存,值后每次 epoll_wait 不拷贝 |
| I/O 触发方式 | 水平触发 LT | 水平触发 LT | LT(水平触发)、ET(边缘触发 默认)和 EPOLLONESHOT(单次触发) |
二者是一对 Linux/Unix 系统调用,它们可以在单个系统调用中读取或写入多个非连续的缓冲区
readv 用于从文件描述符中读取数据,并将数据分散到多个缓冲区中
writev 用于将多个缓冲区的数据连续写入到文件描述符中
优点:
可以避免在用户空间和内核空间之间多次复制数据,从而提高数据传输的效率,同时还可以避免因为多次系统调用而导致的上下文切换开销
#include <sys/uio.h>
ssize_t readv(int fd, const struct iovec *iov, int iovcnt);
ssize_t writev(int fd, const struct iovec *iov, int iovcnt);
//iov数组地址 iovcnt iov长度
struct iovec {
void *iov_base; /* Starting address */
size_t iov_len; /* Number of bytes to transfer */
};简单样例
#include <iostream>
#include <sys/uio.h>
#include <errno.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <cstring>
#define TTY1 "./temp1.o"
using namespace std;
int main(int argc, char **argv)
{
int fd1;
fd1 = open(TTY1, O_RDWR | O_CREAT | O_TRUNC);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
exit(1);
}
char buffer[2][10];
struct iovec iovecs[2];
iovecs[0].iov_base = (void *)(&buffer[0][0]);
iovecs[0].iov_len = 9;
iovecs[1].iov_base = (void *)(&buffer[1][0]);
iovecs[1].iov_len = 9;
strcpy(&buffer[0][0], "12345678\n");
strcpy(&buffer[1][0], "12345678\n");
int ret = writev(fd1, iovecs, 2);
if (ret == 18)
{
cout << ret << endl;
}
else if (ret < 0)
{
cerr << "writen error" << endl;
}
lseek(fd1, 0, SEEK_SET);
buffer[0][0] = 0;
buffer[1][0] = 0;
ret = readv(fd1, iovecs, 2);
cout << ret << endl;
cout << buffer[0];
cout << buffer[1];
close(fd1);
return 0;
}
/*
18
18
12345678
12345678
*/在 Linux 系统编程中,read 与 write 进行 IO
操作时并没有提供保证数据完整性的机制,可能导致一次 I/O
操作并没有读取或写入全部数据,对于某些应用程序是不可接受的
可以自己实现 readn 与 writen 函数
样例
#include <unistd.h>
#include <errno.h>
ssize_t readn(int fd, void *buf, size_t n)
{
size_t nleft = n; // 还需要读nleft个
ssize_t nread;
char *ptr = (char *)buf;
while (nleft > 0)
{
if ((nread = read(fd, ptr, nleft)) < 0)
{
if (errno == EINTR) // 被信号中断
{
nread = 0;
}
else
{
return -1;
}
}
else if (nread == 0)
{
break;
}
nleft -= nread;
ptr += nread;
}
return (n - nleft); // 返回实际读出的字节数
}样例
#include <unistd.h>
#include <errno.h>
ssize_t writen(int fd, void *buf, size_t n)
{
size_t nleft = n; // 还需要写nleft个
ssize_t nwriten;
char *ptr = (char *)buf;
while (nleft > 0)
{
if ((nwriten = write(fd, ptr, nleft)) < 0)
{
if (errno == EINTR) // 被信号中断
{
nwriten = 0;
}
else
{
return -1;
}
}
nleft -= nwriten;
ptr += nwriten;
}
return n;
}存储映射 IO(Memory-mapped IO),该技术允许将文件的内容映射到进程的地址空间中,从而使进程能够像访问内存一样访问文件内容。存储映射 IO 有助于提高文件 IO 的性能,因为它避免了系统调用的开销,同时还可以减少数据的复制。
进程内存空间
|------------|************|---------------------|
|<----len--->|
存储映射IO
|<----len--->|
|------------|************|------------|
文件相关函数
#include <sys/mman.h>
void *mmap(void *addr, size_t length, int prot, int flags,
int fd, off_t offset);
//addr:指定映射区域的起始地址,通常设置为NULL,由系统自动分配。
//length:指定映射区域的长度,一般设置为文件的大小。
//prot:指定映射区域的保护模式,例如PROT_READ表示只读,PROT_WRITE表示可写,PROT_EXEC 可执行、PROT_NONE不可访问。
//flags:指定映射区域的标志,例如MAP_SHARED表示共享映射(写影响原文件),MAP_PRIVATE表示私有映射(写不影响原文件)等(可以看man手册)。
//fd:指定要映射的文件描述符。
//offset:指定从文件的哪个位置开始映射。使用 mmap()函数映射文件后,可以通过访问映射区域的指针来访问文件的内容。当进程访问映射区域的指针时,操作系统会自动将数据从文件中读取到内存中,并且还可以将修改的数据写回到文件中。
mprotect() 函数是一个 POSIX 标准的系统调用,它用于更改指定内存区域的访问权限。该函数需要指定内存区域的地址、大小和新的访问权限,它可以将内存区域设置为只读、可写或不可访问。通常情况下,该函数用于实现内存保护机制,以确保程序不会意外地访问或修改其它程序的内存。
#include <sys/mman.h>
int mprotect(void *addr, size_t len, int prot);
//prot:
//PROT_NONE:表示内存区域不可访问;
//PROT_READ:表示内存区域可读;
//PROT_WRITE:表示内存区域可写;
//PROT_EXEC:表示内存区域可执行。
// 函数返回值为 0 表示成功,返回 -1 表示失败,错误码存储在 errno 变量中。msync() 函数是一个 POSIX 标准的系统调用,它用于将内存中修改过的部分同步到文件中,以确保数据的持久性。该函数通常用于实现内存映射文件(mmap)的机制,以确保数据在内存中的修改能够正确地同步到磁盘上的文件中。
#include <sys/mman.h>
int msync(void *addr, size_t length, int flags);参数 addr 表示要同步到文件中的内存区域的起始地址;参数 length 表示内存区域的大小;参数 flags 可以取如下几个值之一:
MS_ASYNC:表示异步同步,即不等待同步完成就立即返回;
MS_SYNC:表示同步,即等待同步完成后再返回;
MS_INVALIDATE:表示在同步之前将内存区域的内容标记为无效,以强制从文件中重新加载数据。
msync() 函数返回值为 0 表示成功,返回 -1 表示失败,错误码存储在 errno 变量中。
munmap() 函数是一个 POSIX 标准的系统调用,它用于释放通过 mmap() 函数映射到进程地址空间中的内存区域。该函数可以释放单个或多个内存区域,并且可以指定释放的内存区域的大小和起始地址。
#include <sys/mman.h>
int munmap(void *addr, size_t length);其中,参数 addr 表示要释放的内存区域的起始地址;参数 length 表示要释放的内存区域的大小。如果参数 length 是 0,则表示释放从参数 addr 开始的整个内存区域。
munmap() 函数返回值为 0 表示成功,返回 -1 表示失败,错误码存储在 errno 变量中。注意,使用 munmap() 函数释放内存区域会使该区域不再可用,应该在释放前确保不再需要该内存区域,否则可能导致程序崩溃或者内存泄漏。
简单样例
#include <iostream>
#include <errno.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <cstring>
#define TTY1 "./temp1.o"
using namespace std;
int main(int argc, char **argv)
{
int fd1;
fd1 = open(TTY1, O_RDWR | O_CREAT | O_TRUNC);
if (fd1 == -1)
{
cerr << "fd1 open() error" << endl;
exit(1);
}
write(fd1, "hello world", 11);
lseek(fd1, 0, SEEK_SET);
char *m_map = (char *)mmap(nullptr, 11, PROT_READ | PROT_WRITE, MAP_SHARED, fd1, 0);
for (int i = 0; i < 11; i++)
{
cout << m_map[i] << flush;
}
cout << endl;
// 输出hello world
mprotect(m_map, 11, PROT_READ | PROT_WRITE);
strcpy(m_map, "vbclo rorld"); // 此时文件对应内容为vbclo rorld
// 还可以手动释放
munmap(m_map, 0);
close(fd1);
return 0;
}文件锁有很多种实现的方式、常见的有 fcntl、lockf、flock 等
fd映射
进程|0 | |
|1| |
fd |2| | 必要控制信息 inode
|3|----->|---| |----|
| | | | |------->| |
|---| |----|文件锁是体现在 inode 层面的
1、什么是文件锁?
文件锁是一种用于协调多个进程对同一文件的访问的机制。文件锁可以让一个进程在操作文件时将其锁定,以避免其他进程对该文件的并发访问。
2、文件锁的种类有哪些?
Linux 系统中的文件锁主要有两种类型:共享锁和排他锁。共享锁允许多个进程同时对文件进行读取操作,但阻止其他进程对该文件进行写入操作。排他锁则阻止其他进程对文件进行读取和写入操作。
3、文件锁在哪些情况下会失效?
当进程终止时,该进程持有的所有文件锁都会被释放。
当文件描述符被关闭时,与该文件描述符相关的所有文件锁都会被释放。
当进程向另一个进程发送信号并且信号处理程序不忽略该信号时,该进程持有的所有文件锁都会被释放。
4、文件锁是如何实现的?
Linux 系统中的文件锁是通过内核中的记录锁机制来实现的。在内核中,每个打开的文件都有一个文件表项,文件表项中包含有关文件的信息,包括文件锁的信息。当进程使用 fcntl()系统调用来获取文件锁时,内核会在文件表项中记录相应的锁信息,防止其他进程对文件的并发访问。
函数原型
#include <unistd.h>
#include <fcntl.h>
int fcntl(int fd, int cmd, ... /* arg */ );
/*
cmd:
F_DUPFD:复制文件描述符,返回一个新的文件描述符,它指向与原文件描述符相同的文件。
F_GETFD:获取文件描述符标志,可以用来判断文件描述符是否被设置了close-on-exec标志。
F_SETFD:设置文件描述符标志,可以用来设置或清除close-on-exec标志。
F_GETFL:获取文件状态标志,可以用来获取文件的读、写、追加等属性。
F_SETFL:设置文件状态标志,可以用来设置文件的读、写、追加等属性。
F_GETLK:获取指定范围内的文件锁信息,可以用来检查文件是否已经被其他进程锁定。
F_SETLK:设置指定范围内的文件锁,可以用来给文件加锁。
F_SETLKW:与F_SETLK类似,但是如果文件已经被其他进程锁定,则该函数将会等待锁被释放后再进行加锁操作。
*/
struct flock {
...
short l_type; /* Type of lock: F_RDLCK(读锁),
F_WRLCK(写锁), F_UNLCK(解锁) */
short l_whence; /* How to interpret l_start:
SEEK_SET(从文件头开始), SEEK_CUR(从当前位置开始), SEEK_END(从文件末尾开始) */
off_t l_start; /* Starting offset for lock 锁的起始偏移量,从l_whence指定的位置开始计算*/
off_t l_len; /* Number of bytes to lock 锁的长度,从l_start开始计算的长度*/
pid_t l_pid; /* PID of process blocking our lock 锁定文件的进程ID,可以设置为0表示当前进程
(set by F_GETLK and F_OFD_GETLK) */
...
};fcntl 函数的返回值根据所执行的命令不同而有所不同,一般有以下几种情况:
F_DUPFD:返回一个新的文件描述符,指向与原文件描述符相同的文件。
F_GETFD 和
F_GETFL:返回当前的文件描述符标志或文件状态标志,可以通过返回值来判断文件的读、写、追加等属性。
F_SETFD 和 F_SETFL:返回 0 表示操作成功,否则返回-1,并设置 errno
变量来指示错误类型。
F_GETLK:如果指定范围内的锁定状态与要设置的锁定状态相冲突,则返回一个描述冲突锁定的
flock 结构体,否则返回 0。
F_SETLK 和 F_SETLKW:如果操作成功,则返回 0,否则返回-1,并设置 errno
变量来指示错误类型。
需要注意的是,如果 F_SETLK 或 F_SETLKW
命令无法设置锁定,则返回-1,并设置 errno
变量来指示错误类型。例如,如果锁定的区域与现有锁定的区域冲突,则会返回
EAGAIN 或 EACCES 错误;如果锁定的区域超出了文件的范围,则会返回 EINVAL
错误。因此,在使用 fcntl 函数时,需要检查返回值以及 errno
变量来判断是否出现了错误情况。
简单样例
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
int main() {
int fd = open("file.txt", O_WRONLY);
if (fd == -1) {
perror("open");
return -1;
}
struct flock fl = {
.l_type = F_WRLCK,
.l_whence = SEEK_SET,
.l_start = 0,
.l_len = 0,
.l_pid = 0,
};
if (fcntl(fd, F_SETLK, &fl) == -1) {
perror("fcntl");
close(fd);
return -1;
}
printf("Lock acquired!\n");
// Do something with the locked file
close(fd);
return 0;
}lockf 函数只能对整个文件进行锁定,而不能对文件的一部分进行锁定
#include <unistd.h>
int lockf(int fd, int cmd, off_t len);
//lockf函数的返回值为0表示成功,-1表示失败,并设置errno变量来指示错误类型。
//如果在非阻塞模式下,文件当前被其他进程锁定,则返回-1并设置errno变量为EAGAIN或EACCES错误。参数 fd 表示要锁定的文件描述符,cmd 表示要执行的操作,len 表示要锁定的字节数。
lockf 函数的 len 参数用于指定锁定文件的长度。如果 len 参数的值为 0,则表示锁定整个文件;否则,锁定文件的前 len 个字节。需要注意的是,如果 len 参数的值超过文件的实际长度,则只锁定文件的实际长度。如果 len 参数的值为负数,则 lockf 函数的行为是未定义的。
F_LOCK:锁定整个文件,如果文件当前被其他进程锁定,则阻塞等待锁定。
F_TLOCK:锁定整个文件,如果文件当前被其他进程锁定,则立即返回失败。
F_ULOCK:解锁整个文件。
F_TEST:测试文件是否可以被锁定,如果文件当前被其他进程锁定,则返回-1
并设置 errno 变量为 EAGAIN 或 EACCES 错误,否则返回 0。
样例
#include <unistd.h>
#include <fcntl.h>
#include <stdio.h>
int main() {
int fd = open("file.txt", O_RDWR);
if (fd == -1) {
perror("open");
return -1;
}
if (lockf(fd, F_LOCK, 10) == -1) { // 锁定文件前10个字节
perror("lockf");
close(fd);
return -1;
}
printf("Lock acquired!\n");
// Do something with the locked part of the file
lockf(fd, F_ULOCK, 10); // 解锁文件前10个字节
close(fd);
return 0;
}函数原型
#include <sys/file.h>
int flock(int fd, int operation);
// operation:
// LOCK_SH:共享锁定,其他进程仍可对文件加共享锁定,但不能对文件加排他锁定。
// LOCK_EX:排他锁定,其他进程不能对文件加任何类型的锁定,只有释放了当前进程的排他锁定,其他进程才能对文件进行任何类型的锁定。
// LOCK_UN:解锁。
// LOCK_NB:非阻塞模式,如果文件当前被其他进程锁定,则返回-1并设置errno变量为EWOULDBLOCK错误。
// flock函数的返回值为0表示成功,-1表示失败,并设置errno变量来指示错误类型。
// 如果在非阻塞模式下,文件当前被其他进程锁定,则返回-1并设置errno变量为EWOULDBLOCK错误。样例
#include <sys/file.h>
#include <unistd.h>
#include <stdio.h>
int main() {
int fd = open("file.txt", O_RDONLY);
if (fd == -1) {
perror("open");
return -1;
}
if (flock(fd, LOCK_SH) == -1) {
perror("flock");
close(fd);
return -1;
}
printf("Lock acquired!\n");
// Do something with the locked file
close(fd);
return 0;
}主要有 System V 异步 IO、BSD 异步 IO、POSIX 异步 IO,我们主要研究 POSIX 异步 IO
POSIX 异步 I/O(也称为 AIO)是一种用于实现异步 I/O 操作的 API,它允许应用程序发起 I/O 操作而不需要等待操作完成。相比于传统的阻塞 I/O,它可以提高应用程序的并发性和吞吐量,因为应用程序可以在等待 I/O 操作完成的同时继续执行其他任务。
在 POSIX 标准中,AIO 由 aio_ 系列函数组成,这些函数包括 aio_read、aio_write、aio_error 等等。使用 AIO API,应用程序可以将 I/O 操作请求添加到一个队列中,并在 I/O 操作完成时获得通知。这可以通过信号、回调函数或轮询来实现。
需要注意的是,使用 AIO API 需要操作系统支持 AIO 功能。在 Linux 系统中,需要启用 AIO 支持,并且需要使用适当的 I/O 操作和文件描述符类型才能使用 AIO。
aio_fildes:指向要进行 I/O 操作的文件的文件描述符。
aio_offset:表示 I/O 操作在文件中的偏移量。
aio_buf:指向用于 I/O 操作的缓冲区的指针。
aio_nbytes:表示要进行 I/O 操作的字节数。
aio_reqprio:用于设置请求的优先级,通常可以忽略。
aio_sigevent:用于指定 I/O
操作完成时通知的方式,可以是信号、回调函数等。
aio_lio_opcode:指定要执行的 I/O 操作类型,可以是读取、写入等等。
struct aiocb {
int aio_fildes; // 文件描述符
off_t aio_offset; // I/O 操作在文件中的偏移量
volatile void* aio_buf; // I/O 操作缓冲区的地址
size_t aio_nbytes; // I/O 操作的字节数
int aio_reqprio; // 请求优先级
struct sigevent aio_sigevent; // I/O 完成时的通知方式
int aio_lio_opcode; // I/O 操作的类型
};sigev_notify:指定通知方式,可以是以下值之一:
SIGEV_NONE:不使用任何通知方式。
SIGEV_SIGNAL:使用信号通知。
SIGEV_THREAD:使用线程通知。
sigev_signo:当 sigev_notify 指定为 SIGEV_SIGNAL
时,表示要发送的信号编号。
sigev_value:用于传递数据到通知接收方。
sigev_notify_function:当 sigev_notify 指定为 SIGEV_THREAD
时,表示要执行的回调函数。
sigev_notify_attributes:用于指定线程属性,通常可以忽略。
通过设置 sigevent 结构体的字段,可以指定异步 I/O
操作完成时的通知方式。通知可以是信号、回调函数或线程等,应用程序可以根据需要选择合适的通知方式。
union sigval {
int sival_int;
void *sival_ptr;
};
struct sigevent {
int sigev_notify; // 通知类型
int sigev_signo; // 信号编号
union sigval sigev_value; // 传递的数据
void (*sigev_notify_function) (union sigval); // 回调函数
pthread_attr_t *sigev_notify_attributes; // 线程属性
};aio_read 和 aio_write 是 POSIX 异步 I/O API 中用于执行异步读取和写入操作的函数。
aio_read
#include <aio.h>
int aio_read(struct aiocb *aiocbp);
//0 success,-1 -> errnoaio_write
#include <aio.h>
int aio_write(struct aiocb *aiocbp);aio_fsync 函数用于发起异步同步写入操作,即将内核缓冲区中的数据写入到磁盘中,使数据持久化。这个过程需要等待磁盘完成写入操作后,才能返回结果。
#include <aio.h>
int aio_fsync(int op, struct aiocb *aiocbp);它的参数 op 是指定要执行的同步操作类型,可以取以下值:
O_SYNC:执行同步写入操作。
O_DSYNC:执行数据同步写入操作。
O_RSYNC:执行同步读取操作。
获取异步 IO 操作状态
#include <aio.h>
#include <errno.h>
int aio_error(const struct aiocb *aiocbp);返回值:
如果异步 I/O 操作已经完成,则返回异步 I/O 操作的错误代码;
如果异步 I/O 操作还未完成,则返回 EINPROGRESS。
aio_return 函数是异步 I/O 库提供的一个函数,用于获取一个异步 I/O 操作的返回值。
#include <aio.h>
ssize_t aio_return(struct aiocb *aiocbp);
返回值说明:
如果异步 I/O 操作还没有完成,或者操作失败,返回 -1。
如果异步 I/O 操作已经成功完成,返回操作的字节数。#include <stdio.h>
#include <stdlib.h>
#include <aio.h>
#include <cstring>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#define BUFSIZE 1024
int main()
{
int fd;
struct aiocb aio;
char buf[BUFSIZE] = "Hello, world!";
fd = open("test.txt", O_CREAT | O_RDWR | O_TRUNC, 0644);
if (fd < 0)
{
perror("open");
exit(1);
}
aio.aio_fildes = fd;
aio.aio_offset = 0;
aio.aio_buf = buf;
aio.aio_nbytes = strlen(buf);
aio.aio_reqprio = 0;
aio_setup();
/* 发起异步写入操作 */
if (aio_write(&aio) < 0)
{
perror("aio_write");
exit(1);
}
/* 等待异步写入操作完成 */
while (aio_error(&aio) == EINPROGRESS)
;
printf("aio_return: %ld\n", aio_return(&aio)); // 13
/* 发起异步同步写入操作 */
if (aio_fsync(O_SYNC, &aio) < 0)
{
perror("aio_fsync");
exit(1);
}
close(fd);
return 0;
}aio_suspend 是一个函数,用于挂起(阻塞)调用进程,直到一组异步 I/O 操作完成为止。
#include <aio.h>
int aio_suspend(const struct aiocb *const list[], int nent, const struct timespec *const timeout);
/*
list 是一个指向 aiocb 结构体的指针数组,每个 aiocb 结构体代表一个异步 I/O 操作。
nent 是 list 数组中的元素数量。
timeout 是一个指向 timespec 结构体的指针,表示等待操作完成的时间。如果 timeout 是 NULL,则 aio_suspend 将一直等待,直到所有操作完成。
*/aio_suspend 函数会阻塞调用进程,直到 list 数组中的所有操作都完成。如果 timeout 不为 NULL,则最多等待指定时间,时间到期后,aio_suspend 将返回 -1 并设置 errno 为 ETIMEDOUT。
aio_suspend 返回 0 表示所有操作都已经完成,否则返回 -1 并设置 errno 指示错误的原因,常见的错误码包括 EINTR(操作被信号中断)、EINVAL(无效的参数)、EAGAIN(资源暂时不可用)等。
需要注意的是,aio_suspend 函数只能等待调用进程自己提交的异步 I/O 操作,对于其他进程提交的操作,aio_suspend 无法等待。此外,调用 aio_suspend 函数并不会启动任何异步 I/O 操作,它只是等待已经提交的操作完成。
aio_cancel 是一个函数,用于取消一个异步 I/O 操作
#include <aio.h>
int aio_cancel(int fd, struct aiocb *aiocbp);
/*
fd 是异步 I/O 操作使用的文件描述符。
aiocbp 是指向 aiocb 结构体的指针,代表要取消的异步 I/O 操作。如果 aiocbp 是 NULL,则取消指定文件描述符上的所有操作。
*/aio_cancel 函数用于取消一个异步 I/O 操作。如果操作尚未完成,则它将被终止。如果操作已经完成,则取消操作将失败,并且 aio_cancel 将返回一个错误码。
aio_cancel 的返回值为 0 表示成功,否则返回一个非零值表示错误的原因,常见的错误码包括 EINPROGRESS(操作正在进行中,无法取消)、EINVAL(无效的参数)、EBADF(无效的文件描述符)、ENOSYS(不支持的操作)等。
需要注意的是,aio_cancel 只能取消当前进程提交的异步 I/O 操作。对于其他进程提交的操作,aio_cancel 无法取消。此外,aio_cancel 取消操作后,不会自动释放 aiocb 结构体占用的内存空间,需要调用者手动释放。
lio_listio 是一个函数,用于启动一个由多个异步 I/O 操作组成的列表,等待它们全部完成,并按照指定的顺序通知应用程序
#include <aio.h>
int lio_listio(int mode, struct aiocb *const aiocb_list[],
int nitems, struct sigevent *sevp);mode 指定了异步 I/O 操作的执行方式,取值为 LIO_WAIT 或 LIO_NOWAIT。LIO_WAIT 表示等待所有操作完成后再返回,LIO_NOWAIT 表示启动所有操作后立即返回
list 是一个指向 aiocb 结构体的指针数组,每个 aiocb 结构体代表一个异步 I/O 操作。
nent 是 list 数组中的元素数量。
sig 是一个指向 sigevent 结构体的指针,表示操作完成后的通知方式。如果 sig 是 NULL,则 lio_listio 将使用默认的通知方式。
注意:lio_listio 的返回值为 0
表示启动操作成功,否则返回一个非零值表示错误的原因,常见的错误码包括
EINVAL(无效的参数)、EBADF(无效的文件描述符)、ENOMEM(内存不足)等。需要注意的是,lio_listio
的返回值并不能用来判断操作是否成功完成,而应该通过检查每个操作的 aiocb
结构体中的返回值来确定操作的状态。
样例
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <aio.h>
#include <errno.h>
#include <string.h>
#include <unistd.h>
#define BUF_SIZE 1024
int main(int argc, char *argv[])
{
int i, fd[3], ret;
struct aiocb cb[3];
char buf[3][BUF_SIZE];
if (argc < 4) {
printf("Usage: %s <file1> <file2> <file3>\n", argv[0]);
exit(EXIT_FAILURE);
}
// 打开三个文件并初始化aiocb结构体
for (i = 0; i < 3; i++) {
fd[i] = open(argv[i + 1], O_RDONLY);
if (fd[i] == -1) {
perror("open");
exit(EXIT_FAILURE);
}
memset(&cb[i], 0, sizeof(cb[i]));
cb[i].aio_fildes = fd[i];
cb[i].aio_offset = 0;
cb[i].aio_buf = buf[i];
cb[i].aio_nbytes = BUF_SIZE;
cb[i].aio_sigevent.sigev_notify = SIGEV_NONE; // 使用lio_listio时需要禁用回调通知
}
// 执行异步读取操作
ret = lio_listio(LIO_WAIT, cb, 3, NULL);
if (ret == -1) {
perror("lio_listio");
exit(EXIT_FAILURE);
}
// 输出结果并关闭文件
for (i = 0; i < 3; i++) {
printf("%s", buf[i]);
close(fd[i]);
}
return 0;
}IO 是高性能编程中的重中之重,而且在面试中出现的机率非常高,不仅仅要学习应用技术的使用而且要经常学习理论知识,才能在合适的场景下做出更好的选择方案,还有新的 io_uring 等新的技术