到目前其实,UpdateSystem、MessageSystem,以及对象池都有可优化之处,在此还会引入定时器方案。
原来的系统中,都是为每个线程创建一个 EntitySystem 实例来管理
Component 与 Entity 的。 System 可以理解为游戏逻辑的动作部分,如 Update
更新操作就是一个动作,以前驱动 Update 的方式是给 EntitySystem
增加std::list<IUpdateSystem*>队列。
//伪代码
void EntitySystem::Update()
{
for(auto one : updateObjs)
{
one->Update();
}
}假设除了 IUpdateSystem 之外,还有其他的如 IStartSystem
用于组件的首次调用,就要再 EntitySystem
类中增加一个std::list<IStartSystem*>随着功能越来越多,要加的动作越来越多,这使得
EntitySystem 变得越来越不可维护。为每个 System 独立维护一个 list
显然有数据冗余。
需要做的是,丢掉面向对象的接口,以组件的方式实现系统功能,不再使用 IUpdateSystem 这类接口,而是使用 UpdateComponent 组件代替,拥有这个组件就拥有这个功能,每个类都可以为自己创建一个 UpdateComponent 组件,不再需要继承特定的基类,在特殊情况下,甚至某些时间可以给 Entity 加上 UpdateComponent 组件。
class SystemManager : virtual public IDisposable
{
public:
SystemManager();
virtual void Update();
//...
protected:
MessageSystem *_pMessageSystem;
EntitySystem *_pEntitySystem;
std::list<ISystem *> _system;
//...
};让 SystemManager 替代原来 EntitySystem 的地位。
SystemManager::SystemManager()
{
_pEntitySystem = new EntitySystem(this);
_pMessageSystem = new MessageSystem(this);
_systems.emplace_back(new UpdateSystem());
//...
}除了 EntitySystem 之外,所有系统都继承自 ISystem 基类。前面介绍过 EntitySystem 类,严格来说它不算是一个系统,它没有动作,是所有系统的基础,因为它管理着所有实体与组件。
EntitySystem,作为数据管理类,是所有系统的基础。
class EntitySystem : public IDisposable{
public:
template<class T, typename... TArgs>
T* AddComponent(TArgs... args);
template<typename... TArgs>
IComponent* AddComponentByName(std::string className, TArgs.. args);
template<class T>
ComponentCollections* GetComponentCollections();
void Update();
//...
private:
//所有对象
std::map<uint64, ComponentCollections*> _objSystems;
//...
};现在的 EntitySystem 中没有任何动作接口,是一个纯数据类,在类中新增了一种 ComponentCollections 数据,用来保存实体或组件,其作用是将一系列相似的组件放在 一起,所有更新组件 UpdateComponent 实例都放在一个 ComponentCollection 实例中, 当需要取更新组件时,取到对应的 ComponentCollections 实例即可。
class ComponentCollections : public IDisposable
{
public:
void Add(IComponent* pObj);
void Remove(uint64 sn);
//...
private:
//uint64为其父类Entity的sn,一个sn不可能存在多个同一个类型的组件
std::map<uint64, IComponent*> _objs;
std::map<uint64, IComponent*> _addObjs;
std::list<uint64> _removeObjs;
};ComponentCollections 利用了之前 CacheRefresh 的相似之处,避免死锁, 增加数据或删除数据时都会提前缓存,而后在下一帧处理。
template<class T, typename ... TArgs>
T* EntitySystem::AddComponent(TArgs... args){
auto pComponent = DynamicObjectPool<T>::GetInstance()->MallocObject(_systemManager, std::forward<TArgs>(args)...);
AddComponent(pComponent);
return pComponent;
}
template<class T>
inline void EntitySystem::AddComponent(T* pComponent){
const auto typeHashCode = pComponent->GetTypeHashCode();
auto iter = _objSystem.find(typeHashCode);
if(iter == _objSystem.end()){
_objSystems[typeHashCode] = new ComponentCollections(pComponent->GetTypeName());
}
auto pEntities = _objSystems[typeHashCode];
pEntities->Add(dynamic_cast<IComponent*>(pComponent));
}之前有提到,有 3 个可以创建组件的途径,无论哪种情况,生成组件的函数都是由 EntitySystem 提供,也就是上面的 AddComponent 或 AddComponentByName 函数,它们调用类工厂函数。
现在的 EntitySystem 的 Update 意义和之前完全不一样,现在的 Update 只维护每个 ComponentCollections 的 Cache Swap.
void EntitySystem::Update()
{
for(auto iter: _objSystems)
{
iter.second->Swap();
}
}在某一帧对所有拥有 UpdateComponent 组件的实体进行遍历更新操作时,其中一个实体 A 触发了某种特殊情况,生成一个新实体 B, 而生成的新实体 B 也有一个 UpdateComponent 组件,这时,整个管理 UpdateComponent 集合的 ComponentCollections 类就会发生改变,显然这不是应该改变的时机,因为它还在循环遍历执行更新操作。
不论是增加,还是删除组件都放到下一帧去执行,这样可以有效避免冲突。
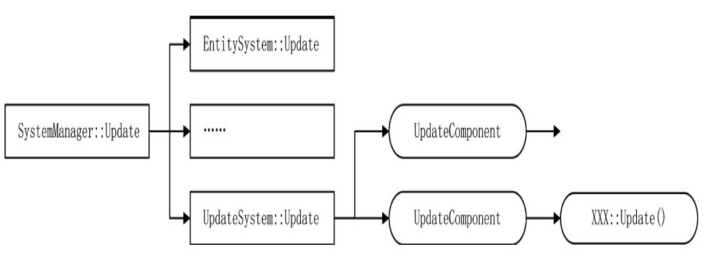
一个是组件类 UpdateComponent,另一个是系统类 UpdateSystem,二者关系为,UpdateComponent 相当于一个标记,它在某个实体上打上了一个需要更新的标记, 而 UpdateSystem 是通过 EntitySystem 找到这些有标记的实体进行更新操作,对实体进行更新操作时,其实没有去找实体,而是通过实体绑定的 UpdateComponent 简介操作 Entity 的更新操作。
例如 NetworkListen 现在应该怎样做。
class Network : public Entity<Network>, public INetwork{}
class NetworkListen : public Network, public IAwakeFromPoolSystem<std::string, int>{}实体会在 AwakeFromPool 时进行相关 Component 的挂载
void NetworkListen::AwakeFromPool(std::string ip, int port)
{
//update
auto pUpdateComponent = AddComponent<UpdateComponent>();
pUpdateComponent->UpdateFunction = BindFunP0(this, &NetworkListen::Update);
//...
return;
}根据这种思路,可以对任何一个类添加 UpdateComponent 组件,而不破坏这个类本身的数据,也不再需要过多的继承,所有类是扁平的,没有层次关系。
class UpdateComponent : public Component<UpdateComponent>, public IAwakeFromPoolSystem<>{
public:
void AwakeFromPool() override;
void BackToPool() override;
std::function<void()> UpdateFunction { nullptr };
}UpdateComponent
组件,有一个std::function用于回调实体的更新函数,如上面的
NetworkListen 类初始化的代码,将 NetworkListen::Update 函数绑定到了
UpdateComponent
组件的std::function变量上,这个函数会在更新系统
UpdateSystem 中被执行。
class UpdateSystem: virtual public ISystem{
public:
void Update(EntitySystem* pEntities) override;
};所有的 System 都继承自 ISystem 类,都必须实现自己的 Update,UpdateSystem 的 Update 实现如下面这样。
void UpdateSystem::Update(EntitySystem* pEntities){
auto pCollections = pEntities->GetComponentCollections<UpdateComponent>();
if(pCollections == nullptr)
return;
pCollections->Swap();
auto lists = pCollections->GetAll();
for(const auto one : lists){
const auto pComponent = one.second;
const auto pUpdateComponent = static_case<UpdateComponent*>(pComponent);
pUpdateComponent->UpdateFunction();
}
}在 SystemManager 中,每一帧都会调用所有系统的 Update 函数,而对于 UpdateSystem 而言,UpdateSystem::Update 的作用就是遍历所有 UpdateComponent 组件绑定的更新函数,NetworkListen 类的更新函数 Update 只是其中之一。
这样系统整体是松耦合的,虽然 EntitySystem 实体和 UpdateComponent 相互拥有对方的指针, 但是从本质上来说,它们是两个独立的类。EntitySystem 实体提供了一个绑定函数,而 UpdateComponent 组件负责执行该绑定函数,对于每个 UpdateComponent 实例,它不了解也不关心 更新函数内部到底做了什么。
一个基本的框架除了基本的更新操作之外,重要的还有协议的收发,在之前这两个功能融合在 ThreadObject 基类中,之后有了 EntitySystem,协议的收发变成了继承 IMessageSystem 接口。
class MessageComponent : public Component<MessageComponent>, public IAwakeFromPoolSystem<IMessageCallBackFunction*>
{
public:
~MessageComponent();
void AwakeFromPool(IMessageCallBackFunction* pCallback) override;
void BackToPool() override;
bool IsFollowMsgId(Packet* packet) const;
void ProcessPacket(Packet* packet) const;
protected:
IMessageCallBackFunction* _pCallBackFuns{nullptr};
};先回顾之前的消息系统
现在,要将消息系统改造为,只要有了 MessageComponent 组件就可以处理消息,例如,在某些条件下,实体 A 可以处理 1、2 号协议,当它的状态发生改变时,可以删除这个 MessageComponent 组件,增加一个新的 MessageComponent 组件,这时可以处理 3、4 号协议。整个消息系统会非常灵活。
现在,当 Packet 到来之后,需要将数据转到 MessageSystem
系统中,任何时候调用MessageSystem::AddPacketToList都可以将一个
Packet 缓存到 MessageSystem 系统中。
class MessageSystem : virtual public ISystem{
public:
void Update(EntitySystem* pEntities) override;
void AddPacketList(Packet* pPacket);
//...
private:
static void Process(Packet* pPacket, std::map<uint64, IComponent*>& lists);
private:
std::mutex _packet_lock;
CacheSwap<Packet> _cachePackets;
//...
};MessageSystem 的 Update
则与改造后的UpdateSystem::Update类似。
例如原来的 Account 实体,使用改造后的框架逻辑,其定义应该为
//现在定义
class Account : public Entity<Account>, public IAwakeFromPoolSystem<>{}
//之前定义
class Account : public Component<Account>, public IMessageSystem, public IAwakeFromPoolSystem<>{}之前其实 NetworkListen 组件被随机放置到了某个线程中,我们希望 NetworkListen 类可以独占一个线程,除此之外可能还希望启动多个 MysqlConnector 组件达到数据库连接池效果。
但是现在有一个问题,假设有两个线程,每个线程中都有 MysqlConnector 实例,那么查询玩家的协议是否会被执行两次,毕竟现在所有协议是分发给所有线程的。
现在有必要对线程类型做一个规划,有些线程对于协议的处理是互斥的。所谓互斥,就像 MysqlConnector 组件一样,只需在多个线程中挑一个放进去即可,而另一些线程是完全平等的。
enum ThreadType{
MainThread = 1 << 0,
ListenThread = 1 << 1,//监听线程
ConnectThread = 1 << 2, //client连接
LogicThread = 1 << 3, //逻辑线程
MysqlThread = 1 << 4, //数据库线程
AllThreadType = MainThread | ListenThread | LogicThread | ConnectThread | MysqlThread,
};那么 ThreadMgr 也需要修改
//继承SystemManager原因是ThreadMgr是主线程,主线程也有自己的SystemManager
class ThreadMgr : public Singleton<ThreadMgr>, public SystemManager{
//...
private:
std::map<ThreadType, ThreadCollector*> _threads;
};同一种类型的线程放在同一个 ThreadCollector 中
class ThreadCollector : public IDisposable{
public:
//...
virtual void HandlerMessage(Packet* pPacket);
virtual void HandlerCreateMessage(Packet* pPacket);
protected:
ThreadType _threadType;
CacheRefresh<Thread> _threads;
size_t _index{0};
};
//发给所有同类型线程
void ThreadCollector::HandlerMessage(Packet* pPacket){
auto pList = _threads.GetReaderCache();
for(auto iter = pList->begin(); iter != pList->end(); ++iter){
(*iter)->GetMessageSystem()->AddPacketToList(pPacket);
}
}除此之外还需要一种扩展的 ThreadCollector,可用于 MySQL 线程上,逻辑线程和数据库线程最大的区别在于协议的处理,当一个协议到来时,数据库线程只需要挑选一个线程实例处理协议即可,而逻辑线程需要将协议发送到所有线程实例中。
class ThreadCollectorExclusive:public ThreadCollector{
public:
//...
virtual void HandlerMessage(Packet* pPacket) override;
virtual void HandlerCreateMessage(Packet* pPacket) override;
private:
size_t _index;
};
//只发给一个线程处理即可
void ThreadCollectorExclusive::HandlerMessage(Packet* pPacket){
auto vectors = *(_threads.GetReaderCache());
vectors[_index]->GetMessageSystem()->AddPacketToList(pPacket);
_index++;
_index = _index >= vectors.size() ? 0 : _index;
}在逻辑线程集合中收到一个协议,一定是广播出去的。例如,收到网络断开协议,因为不知道 在整个线程中有哪些组件关心这些协议,所以一定是对逻辑进程集合整个广播。而对于一个存储协 议来说,处理流程则不相同,为了让数据库操作分散,每一个数据库线程都是完全一样的,它们有 同样的组件。这时 ThreadCollectorExclusive 类的执行方式是采用轮询的方式,以达到均衡的目 的。
在之前,采用的是全局对象池,即一种类型的对象池只有一个实例。在多线程中使用对象池,操作已使用、未使用的集合时进行了加锁操 作。
将全局对象池变更为线程对象池。一般来说,线程中创建的对象都在线程内使用,这些对象是不需要加锁的。
以前是使用以下方式获取对象池实例
DynamicObjectPool<Class>::GetInstance();如果有多个不同的类对象池,就有多个 DynamicObjectPool 实例,为了便 于管理,引入一个新类 DynamicObjectPoolCollector,其作用是维护 DynamicObjectPool 集合。这个新类用 SystemManager 管理,相当于每个 ECS 体系都有一个对象池管理类。
class DynamicObjectPoolCollector : public IDisposable{
public:
DynamicObjectPoolCollector(SystemManager* pSys);
void Dispose();
template<class T>
IDynamicObjectPool* GetPool();
void Update();
private:
std::map<uint64, IDynamicObjectPool*> _pools;
SystemManager* _pSystemManager{nullptr};
};GetPool 用于提取合适的对象池实例
template<class T>
IDynamicObjectPool* DynamicObjectPoolCollector::GetPool(){
const auto typeHashCode = typeid(T).hash_code();
auto iter = _pools.find(typeHashCode);
if(iter != _pools.end()){
return iter->second;
}
auto pPool = new DynamicObjectPool<T>();
pPool->SetSystemManager(_pSystemManager);
_pools.insert(std::make_pair(typeHashCode, pPool));
return pPool;
}DynamicObjectPoolCollector 类实例是在 SystemManager 类创建时产生的。
SystemManager::SystemManager(){
_pEntitySystem = new EntitySystem(this);
_pMessageSystem = new MessageSystem(this);
//...
_pPoolCollector = new DynamicObjectPoolCollector(this);
}一个对象池实例不会对所有线程共用,它一定属于某个特定的线程,每个 线程有自己的对象池实例。当我们对进程和线程进行合并时,合并到最后,整 个变成单进程、单线程,此时全局只有一个 SystemManager,而对象池管理类 也只有一个。
以前,对象池分配对象是要加锁的
DynamicObjectPool<T>::GetInstance()->MallocObject();现在不论在哪个组件中创建对象,都可以像以下调用,内外部都不用加锁了,因为每个线程都有自己的 PoolCollector
auto pCollector = pSysMgr->GetPoolCollector();
auto pPool = (DynamicObjectPool<T>*)pCollector->GetPool<T>();
T* pComponent = pPool->MallocObject();除了 ThreadMgr 类之外,几乎去掉了所有全局单例对象。主要原因是单例太难管理,单例使用前要调用生成函数,退出程序时也需要调用销毁函数。在实际编码中,在生 成单例类时,要么忘记调用 Instance 函数来生成它,要么忘记编写 DestroyInstance 函数来销毁它。
可以使用对象池来管理单例类。
void ThreadMgr::InitializeGlobalComponent(APP_TYPE ppType, int appId){
//全局component
GetEntitySystem()->AddComponent<ResPath>();
GetEntitySystem()->AddComponent<Log4>(ppType);
GetEntitySystem()->AddComponent<Yaml>();
GetEntitySystem()->AddComponent<NetworkLocator>();
//...
}为了解决单例,将 IAwakeSystem 接口改造下,改为两种
template<typename... TArgs>
class IAwakeSystem:virtual public ISystem{
public:
IAwakeSystem() = default;
virtual ~IAwakeSystem() = default;
virtual void Awake(TArgs... args) = 0;
static bool IsSingle() {return true;}
};
template<typename... TArgs>
class IAwakeFromPoolSystem :virtual public ISystem{
public:
IAwakeFromPoolSystem() = default;
virtual ~IAwakeFromPoolSystem() = default;
virtual void Awake(TArgs... args) = 0;
static bool IsSingle(){return false;};
};例如单例对象
class Yaml : public Component<Yaml>, public IAwakeSystem<>{}非单例
class ConnectObj : public Entity<ConnectObj>, public IAwakeFromPoolSystem<SOCKET>{}单例情况则要在对象池的 MallocObject 方法处理
template<typename T>
template<typename ... Targs>
T* DynamicObjectPool<T>::MallocObject(Targs... args){
if(_free.size() == 0){
if(T::IsSingle()){
T* pObj = new T();
pObj->SetPool(this);
_free.push(pObj);
}else{
for (int index = 0; index < 50 ; index++){
T* pObj = new T();
pObj->SetPool(this);
_free.push(pObj);
}
}
}
}如 NetworkListen
class NetworkListen : public Network, public IAwakeSystem<std::string, int>{}最好设计一个命令行工具,或者监控,利用好 Actor 设计就好了。
销毁组件或实例有两种需求,一种是在本线程中销毁,适合一般的对象。另一种是像 Packet 类这种跨线程实例。
当不再需要一个组件时,有两种可以销毁的方式:
Entity::RemoveComponent销毁。EntitySystem::RemoveComponent函数销毁。void HttpRequest::Update(){
switch(_state){
//...
case HttpRequestState::HRS_Over:{
ProcessOver();
_state = HttpRequestState::HRS_NoActive;
GetSystemManager()->GetEntitySystem()->RemoveComponent(this);
}break;
case HttpRequestState::HRS_Timeout:{
ProcessTimeout();
_state = HttpRequestState::HRS_NoActive;
GetSystemManager()->GetEntitySystem()->RemoveComponent(this);
}
//...
}
}下面为EntitySystem::RemoveComponent实现。
void EntitySystem::RemoveComponent(IComponent* pObj){
const auto entitySn = pObj->GetSN();
const auto typeHashCode = pObj->GetTypeHashCode();
auto iterObj = _objSystems.find(typeHashCode);
if(iterObj == _objSystems.end()){
return;
}
ComponentCollections* pCollector = iterObj->second;
pCollector->Remove(entitySn);
}
void ComponentCollections::Remove(uint64 sn){
_removeObjs.emplace_back(sn);
}在每个线程中,EntitySystem 都拥有所有的对象实例,这些实例是按照类型不同放到 ComponentCollections 中的。 当要销毁一个组件时,将组件从 ComponentCollections 中以除,重新放回对象池即可。
ComponentCollections 将需要删除的对象进行了缓冲,放到了删除列表中,在下一帧才会真正删除。
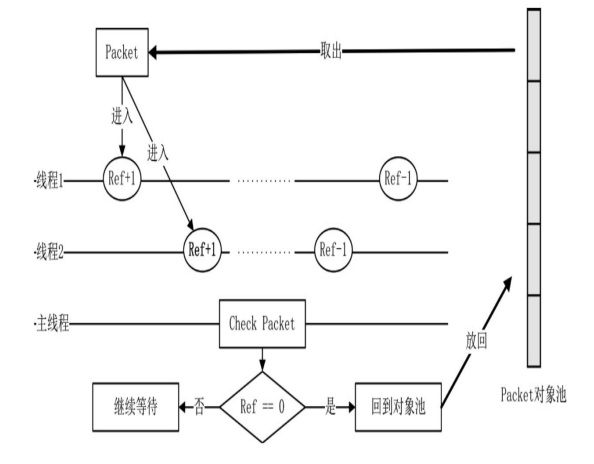
Packet 对象的销毁比较复杂,因为它会穿越多个线程,Packet 对象的销毁可以采用引用计数的方式。
在 Packet 类中定义计数
class Packet : public Entity<Packet>, public Buffer, public IAwakeFromPoolSystem<Proto::MsgId, SOCKET>{
public:
void AddRef();
void RemoveRef();
void OpenRef();
bool CanBack2Pool();
//...
private:
std::atomic<int> _ref{0};
bool _isRefOpen{false};
}对 Packet 类增加了 AddRef、RemoveRef 函数,用来进行计数。计数是在多线程中进行的,所以变量采用了 std:: atomic 类型来处理。std::atomic 是一个原子操作,底层已经加锁,不需要额外加锁。函数 AddRef 对引用计数加 1, 而函数 RemoveRef 对引用计数减 1,当我们使用对象时,它的引用计数加 1;当引用计数重新变为 0 时,表示所有使用已 结束,可以销毁了。
对于每个线程来说必然有一个 MessageSystem 系统处理协议,Packet 进入 MessageSystem 类处理队列,则计数加 1,处理完成之后计数减 1.
void MessageSystem::AddPacketToList(Packet* pPacket){
std::lock_guard<std::mutex> guard(_packet_lock);
_cachePackets.GetWriterCache()->emplace_back(pPacket);
pPacket->AddRef();
}
void MessageSystem::Update(EntitySystem* pEntities){
//...
auto lists = pCollections->GetAll();
auto packetLists = _cachePackets.GetReaderCache();
for(auto iter = packetLists->begin(); iter != packetLists->end(); ++iter){
auto pPacket = (*iter);
Process(pPacket, lists);
pPacket->RemoveRef();
}
_cachePackets.GetReaderCache()->clear();
}主线程分发协议的代码,是 Packet 进入各线程中的必经函数
void ThreadMgr::UpdateDispatchPacket(){
//...
auto pList = _packets.GetReaderCache();
for(auto iter = pList->begin(); iter != pList->end(); ++iter){
auto pPacket = (*iter);
//...
for(auto iter = _threads.begin(); iter != _threads.end(); ++iter){
iter->second->HandlerMessage(pPacket);
}
pPacket->OpenRef();
}
pList->clear();
}
void ThreadCollector::HandlerMessage(Packet* pPacket){
auto pLisr = _threads.GetReaderCache();
for(auto iter = pList->begin(); iter != pList->end(); ++iter){
iter->second->GetMessageSystem()->AddPacketToList(pPacket);
}
}处理 Packet 时将 Packet 通知到各个线程集合,而线程集合再将 Packet 加入各个线程中。该加入操作完成之后调用 了 OpenRef 函数,这个函数开始了 Packet 的检查。在 Packet 生成到加入线程之前,引用计数都是 0,显然这时检查计数是不合适的。只有当 OpenRef 这个开关打开之后,也就是说 Packet 已经放置到线程中才是检查的时机。
void Packet::OpenRef(){
_isRefOpen = true;
}
bool Packet::CanBack2Pool(){
if(!_isRefOpen)
return false;
if(_ref == 0)
return true;
return false;
}如果 CanBack2Pool 函数返回 true,这个 Packet 就认为被用完了,恢复到对象池中,等下次使用。
当调用一个 HttpRequest 向外请求一个 HTTP 时,由于某些原因请求没有回应,登录就会一直卡在这里,客户端发送了 C2L_AccountCheck 协议,但是一直没有得到回应,它只有等待下去。login 进程中的 Account 类也很无奈,HttpRequest 没有给它反馈,Account 类自然也没有办法给客户端反馈数据。分析一下产生这个问题的原因,是因为没有对 HttpRequest 定时检查,如果开始时就设置一个 10 秒期限,在 10 秒之后还没有反馈,就认为请求失败了,即使后面请求来了,也认为是失败的,这个问题就迎刃而解了。
void RobotMgr::Update(){
//...
auto pGlobal = Global::GetInstance();
if(_nextShowInfoTime > pGlobal->TimeTick)
return;
_nextShowInfoTime = timeutil::AddSeconds(pGlobal->TimeTick, 2);
ShowInfo();
}定时打印采用的逻辑是记录下一次的打印时间,如果时间到来,就调用 ShowInfo 函数打印信息。同时,在当前时间的基础上增加两秒,设为下一次的打印时间。
Update 函数是每帧调用的,每一帧的循环中都会判断一次是否到了触发时间。假如进程每秒调用 100 次,也就是说在两秒内有 200 次 if 判断。如果在整个框架中存在大量这种时间判断,其实也在消耗性能,而且这段代码看上去也不够优雅。所以,我们需要采用一种新的机制,以最少的判断来执行时间函数调用,也就是下面要讲到的时间堆。
要制作的定时器就是基于二叉树的原理,名为时间堆。时间堆包括最大时间堆和最小时间堆。将整个二叉树进行排序,顶点是最小时间间隔,为最小时间堆;最下层的叶子节点为最大时间间隔,为最大时间堆。
在一个线程中有这样一个时间堆,那么每一帧只需要有限的判断,判断当前时间与顶点时间的大小,即可得知是否要触发这个定时器的调用。如果最近的一个调用时间都没有到来,那么这个堆中的其他时间节点肯定不会触发。假设有 100 个定时器,按照之前的代码逻辑,需要编写 100 个触发判断函数,而现在被压缩在了顶点上,只需要一次判断。
int main()
{
std::vector<int> data{9, 1, 6, 3, 8, 9};
make_heap(data.begin(), data.end(), std::greater<int>());
PopData(data);
PopData(data);
PushData(data, 5);
PushData(data, 1);
return 0;
}
void PopData(std::vector<int>& data){
//弹出heap顶元素,将其放置于区间末尾
pop_heap(data.begin(), data.end(), std::greater<int>());
//末尾数据
data.back();
//弹出末尾数据
data.pop_back();
}
void PushData(std::vector<int>& data, const int value){
data.push_back(value);
push_heap(data.begin(), data.end(), std::greater<int>());
}在 std 标准库中,对于堆有两种已实现的计算,默认是最大堆
less<T> 和最 小堆
greater<T>,当然也可以自己定义排序算法,std
支持自定义算法的定义。
使用最小堆的概念写一个定时器
using TimerHandleFunction = std::function<void(void)>;
struct Timer
{
timeutil::Time NextTime; // 下次调用时间
TimerHandleFunction Handler; // 调用函数
int DelaySecond; // 首次执行时延迟秒
int DurationSecond; // 间隔时间(秒)
int CallCountTotal; // 总调用次数(0为无限)
int CallCountCur; // 当前调用次数
uint64 SN; // 方便删除数据时找到Timer
};在时间堆中每个节点都是 Timer 结构,这种结构包括总调用次数、调用时间间隔、当前调用次数、调用函数和下次调用时间等。如果总调用次数为 0,这个节点就是一个无限次数的循环定时器。属性 DelaySecond 是首次执行时延时,这个属性和时间间隔有一定的区别。
定时器组件 TimerComponent
class TimerComponent : public Entity<TimerComponent>, public IAwakeSystem<>
{
public:
void Awake() override;
uint64 Add(int total, int durations, bool immediateDo, int immediateDoDelaySecond, TimerHandleFunction func);
void Remove(std::list<uint64> &timers);
bool CheckTime();
Timer PopTimeHeap();
void Update();
//...
private:
std::vector<Timer> _heap;
};从组件 TimerComponent 的定义中可以看出,它是一个单例,对于一个线程来说,只需要有一个 TimerComponent 组件。在初始化时为该组件增加 UpdateComponent 组件,以方便每一帧检查是否有到了时间的函数需要执行。
TimerComponent 组件的初始化与更新函数如下:
void TimerComponent::Awake()
{
auto pUpdateComponent = AddComponent<UpdateComponent>();
pUpdateComponent->UpdataFunction = BindFunP0(this, &TimerComponent::Update);
}
void TimerComponent::Update()
{
while (CheckTime())
{
Timer data = PopTimeHeap();
data.Handler();
if (data.CallCountTotal != 0)
data.CallCountCur++;
if (data.CallCountTotal != 0 && data.CallCountCur >= data.CallCountTotal)
{
// delete pNode; 取出之后,不再加入堆中
}
else
{
// 重新加入堆中
data.NextTime = timeutil::AddSeconds(Global::GetInstance()->TimeTick, data.DurationSecond);
Add(data);
}
}
}在更新函数中,首先检查是否有需要执行的节点
bool TimerComponent::CheckTime()
{
if (_heap.empty())
return false;
const auto data = _heap.front();
return data.NextTime <= Global::GetInstance()->TimeTick;
}在每个线程中都有一个 TimerComponent 组件实例,每个 EntitySystem 中都有一个独立的 TimerComponent 组件负责 该进程所有需要按时间调用的事件。在线程启动时,该组件就被创建出来了。每个组件都有可能需要定时器,为了方便组件调用定时器,修改了 IComponent 组件,增加了一个关于定时器的函数。
class IComponent : virtual public SnObject
{
protected:
void AddTimer(const int total, const int durations, const bool immediateDo, const int immediateDoDelaySecond, TimerHandleFunction handler);
std::list<uint64> _timers;
//...
};
void IComponent::AddTimer(const int total, const int durations, const bool immediateDo, const int immediateDoDelaySecond, TimerHandleFunction handler)
{
auto obj = GetSystemManager()->GetEntitySystem()->GetComponent<TimerComponent>();
const auto timer = obj->Add(total, durations, immediateDo, immediateDoDelaySecond, std::move(handler));
_timers.push_back(timer);
}当组件被销毁时,这些定时器也会被销毁。
void IComponent::ComponentBackToPool()
{
BackToPool();
if (!_timers.empty())
{
auto pTimer = _pSystemManager->GetEntitySystem()->GetComponent<TimerComponent>();
if (pTimer != nullptr)
pTimer->Remove(_timers);
_timers.clear();
}
//...
}例如 RobotMgr
void RobotMgr::Awake(){
//...
AddTimer(0, 2, false, 0 ,BindFunP0(this,&RobotMgr::ShowInfo));
}TimerComponent::Add的实现
void TimerComponent::Add(Timer &data)
{
_heap.emplace_back(data);
if (_heap.size() == 1)
{
make_heap(_heap.begin(), _heap.end(), CompareTimer());
}
else
{
push_heap(_heap.begin(), _heap.end(), CompareTimer());
}
}
uint64 TimerComponent::Add(const int total, const int durations, const bool immediateDo, const int immediateDoDelaySecond, TimerHandleFunction handler)
{
// durations 执行间隔秒
// immediateDo 是否马上执行
// immediateDoDelaySecond 首次执行与当前时间的间隔时间
Timer data;
data.SN = Global::GetInstance()->GenerateSN();
data.CallCountCur = 0;
data.CallCountTotal = total;
data.DurationSecond = durations;
data.Handler = std::move(handler);
data.NextTime = timeutil::AddSeconds(Global::GetInstance()->TimeTick, durations);
if (immediateDo)
{
data.NextTime = timeutil::AddSeconds(Global::GetInstance()->TimeTick, immediateDoDelaySecond);
}
Add(data);
return data.SN;
}为了堆的正常排序,需要自定义 Timer 的排序类
struct CompareTimer{
constexper bool operator()(const Timer& _Left, const Timer& _Right) const{
return (_Left.NextTime > _Right.NextTime);
}
};组件中只需要调用一个 AddTimer 函数就可以生成一个定时器。除了时间堆之外,还有一种定时器的模式叫时间轮。时间轮比时间堆效率更高,因为插入和取出时,时间轮都没有时间成本,但时间轮的数据结构更为复杂。
不一定,写业务代码时用定时器其实也不是很方便,容易出错。还不如简单的在 Update 做时间间隔判断。