其中 05_XX 部分.
学习嘛,要稳扎稳打,学习使用工具对程序性能检查,思考怎样让程序更加高效很重要。
Visual Stdudio 性能工具,就先不学了,暂时用不到
在多线程编程中,注意谨防并行编程串行
void ThreadMgr::DispatchPacket(Packet *pPacket)
{
// 主线程
AddPacketToList(pPacket);
// 子线程
std::lock_guard<std::mutex> guard(_thread_lock);
for (auto iter = _threads.begin(); iter != _threads.end(); ++iter)
{
Thread *pThread = iter->second;
pThread->AddPacketToList(pPacket);
}
}
void ThreadObjectList::AddPacketToList(Packet *pPacket)
{
std::lock_guard<std::mutex> guard(_obj_lock);
for (auto iter = _objlist.begin(); iter != _objlist.end(); ++iter)
{
ThreadObject *pObj = *iter;
if (pObj->IsFollowMsgId(pPacket))
{
pObj->AddPacket(pPacket);
}
}
}上面的代码中有哪些不足之处,要知道 ThreadMgr 只有一个,其管理多个线程,每个线程的 ThreadObjectList 下管理大量的 ThreadObject。 这样调用 DispatchPacket 明明只是需要将 Packet 交给每个线程就行了,其实并不需要关注每个线程怎么做。交给每个线程,每个线程自己在 Update 时再处理将 Packet 派发给 ThreadObject 就好了。 能够有效 ThreadMgr::DispatchPacket 从调用到返回的间隔。
在上一章节中,看到了使用 std::copy 开拷贝 std::list 中的 Packet 的操作,显然这是非常耗费事件的,所以对内存中的数据结构进行优化也非常的重要。
数据结构是计算机组织数据的方式,精心选择的数据结构可以带来更高的 运行或者存储效率。下面会了解交换型数据结构与刷新型数据结构。
下面的样例就是一个典型的可以优化的
void Network::SendPacket(Packet* pPacket){
std::lock_guard<std::mutex> guard(_sendMsgMutex);
_sendMsgList.push_back(pPacket);
}
//如果要处理这些放在List中的包
void Network::Update(){
std::list<Packet*> _tmpSendMsgList;
_sendMsgMutex.lock();
std::copy(_sendMsgList.begin(),_sendMsgList.end(),std::back_inserter(_tmpSendMsgList));
_sendMsgList.clear();
_sendMsgMutex.unlock();
for(auto pPacket:_tmpSendMsgList){
//SendPacket
}
_tmpSendMsgList.clear();
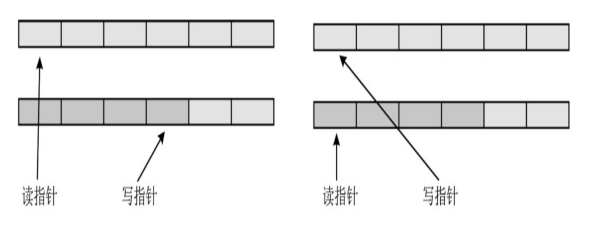
}这样虽然可以免去,在遍历包的时候持有锁,但是现在存在将指针数据进行 copy 的操作,这并不是一个高效的操作,进行 copy 会将持有锁的时间较长。在并发编程中造成效率低下。有没有一种空间换时间的可行方案呢?
其实可以采用两个 List,将原来的 copy 操作换为简单的将两个 List 指针变量存储的地址交换就好了。两个 List 指针变量存储的地址根据场景来换交换就能解决许多问题。
template <class T>
class CacheSwap
{
public:
std::list<T *> *GetWriterCache();
std::list<T *> *GetReaderCache();
void Swap();
bool CanSwap();
//...
private:
std::list<T *> _caches1;
std::list<T *> _caches2;
std::list<T *> _readerCache;
std::list<T *> *_writerCache;
};
template <class T>
void CacheSwap<T>::Swap()
{
auto tmp = _readerCache;
_readerCache = _writerCache;
_writerCache = tmp;
}
// 当写数据队列中有数据时,需要对调
template <class T>
bool CacheSwap<T>::CanSwap()
{
return _writerCache->size() > 0;
}这些都是实战技巧。但是也应该注意线程安全问题,当有正在写正在读操作时,是不能进行指针交换操作的。
在以前的 ThreadObjectList 中存储线程需要为自己管理的 ThreadObject
进行 Packet 广播,在 ThreadObjectList 中可以使用
CacheSwap<Packet>_cachePackets ThreadMgr
将包发到_cachePakcets
//ThreadMgr为ThreadObjectList添加包
void ThreadObjectList::AddPacketToList(Packet *pPacket)
{
std::lock_guard<std::mutex> guard(_packet_lock);
_cachePackets.GetWriterCache()->emplace_back(pPacket);
}读数据则在 ThreadObjectList 进行 Update 的时候进行操作,现在优化前后 AddPacketToList 的效率会高很多。
void ThreadObjectList::Update()
{
//...
_packet_lock.lock();
if (_cachePackets.CanSwap())
{
_cachePackets.Swap();
}
_packet_lock.unlock();
auto pList = _objlist.GetReaderCache();//ThreadObject存储在对象池
auto pMsgList = _cachePackets.GetReaderCache();
// 遍历线程管理的所有ThreadObject
for (auto iter = pList->begin(); iter != pList->end(); ++iter)
{
auto pObj = (*iter);
for (auto itMsg = pMsgList->begin(); itMsg != pMsgList->end(); ++itMsg)
{
auto pPacket = (*itMsg);
if (pObj->IsFollowMsgId(pPacket))
pObj->ProcessPacket(pPacket);
}
pObj->Update();
...
}
pMsgList->clear();
}在上面的 ThreadObjectList::Update 中,可以看见在进行 ThreadObject 遍历时,是调用了一个 GetReaderCache 方法。其实使用了 CacheRefresh 方式来存储。
template<class T>
class CacheRefresh :public IDisposable
{
public:
std::vector<T*>* GetAddCache();
std::vector<T*>* GetRemoveCache();
std::vector<T*>* GetReaderCache();
std::list<T*> Swap();
bool CanSwap();
void Dispose() override;
protected:
std::vector<T*> _reader;
std::vector<T*> _add;
std::vector<T*> _remove;
};
template <class T>
inline std::vector<T*>* CacheRefresh<T>::GetAddCache()
{
return &_add;
}
template <class T>
inline std::vector<T*>* CacheRefresh<T>::GetRemoveCache()
{
return &_remove;
}
template <class T>
inline std::vector<T*>* CacheRefresh<T>::GetReaderCache()
{
return &_reader;
}
template <class T>
inline std::list<T*> CacheRefresh<T>::Swap()
{
std::list<T*> rs;
//添加要添加的
for (auto one : _add)
{
_reader.push_back(one);
}
_add.clear();
//删除要删除的
for (auto one : _remove)
{
auto iterReader = std::find_if(_reader.begin(), _reader.end(), [one](auto x)
{
return x == one;
});
if (iterReader == _reader.end())
{
std::cout << "CacheRefresh Swap error. not find obj to remove. sn:" << one->GetSN() << std::endl;
}
else
{
rs.push_back(one);
_reader.erase(iterReader);
}
}
_remove.clear();
return rs;//返回要删除的
}
template <class T>
inline bool CacheRefresh<T>::CanSwap()
{
return _add.size() > 0 || _remove.size() > 0;
}
template<class T>
inline void CacheRefresh<T>::Dispose()
{
for (auto iter = _add.begin(); iter != _add.end(); ++iter)
{
(*iter)->Dispose();
delete (*iter);
}
_add.clear();
for (auto iter = _remove.begin(); iter != _remove.end(); ++iter)
{
(*iter)->Dispose();
delete (*iter);
}
_remove.clear();
for (auto iter = _reader.begin(); iter != _reader.end(); ++iter)
{
(*iter)->Dispose();
delete (*iter);
}
_reader.clear();
}上面的代码其实写的针不错,这样的话大大减消了性能瓶颈,不然多个线程对同一个 list 进行删减增操作,抢锁激烈,性能也将堪忧。
class ThreadObjectList: public IDisposable{
public:
void AddObject(ThreadObject* _obj);
...
protected:
std::mutex _obj_lock;
CacheRefresh<ThreadObject> _objlist;
};添加 ThreadObject 到 ThreadObjectList
void ThreadObjectList::AddObject(ThreadObject* obj){
std::lock_guard<std::mutex> guard(_obj_lock);
...
_objlist.GetAddCache()->emplace_back(obj);
}CacheRefresh<ThreadObject> _objlist的Swap
则需要在ThreadObjectList::Update内执行,这样效率更高。
void ThreadObjectList::Update(){
_obj_lock.lock();
if(_objlist.CanSwap()){
auto pDelList = _objlist.Swap();
for(auto pOne:pDelList){
pOne->Dispose();
delete pOne;
}
}
_obj_lock.unlock();
//...
auto pList = _objlist.GetReaderCache();
//...
}看来多加一层缓冲会发生很多神奇的操作。
在 Linux 上也有很多简单好用的性能分析工具,其中之一就是 gprof,它是 GNU 套件中的一个工具。如每个函数的调用次数、调用时 长,可以方便找到系统的瓶颈。
root@drecbb4udzdboiei-0626900:/mes/tubekit/bin# gprof -v
GNU gprof (GNU Binutils for Ubuntu) 2.38
Based on BSD gprof, copyright 1983 Regents of the University of California.
This program is free software. This program has absolutely no warranty.使用 gprof 的时候需要注意一点,生成可执行文件时需要加参数“-pg”,执行可执行文件之后,在同目录下就会多出一个分析结果 gmon.out 文件。 如果同一个目录下有多个可执行文件都会生成 gmon.out 文件。但是 gmon.out 文件只有一个文件,所以不要在同一目录测试不同的可执行文件。
$gprof 可执行文件名称 gmon.out
#gprof导出txt文件
$gprof -b 可执行文件 gmon.out > output.txt甚至还可以画出堆栈图,可以更直观在每个函数执行的效率。
$python
$yum -y update
$yum install graphviz
$yum-y install python-setuptools
#安装gprof2dot https://github.com/jrfonseca/gprof2dot
$tar xf gprof2dot-2017.09.19.tar.gz
$python setup.py install
#生成PHG文件
$gprof2dot output.txt > output.dot
$dot -Grankdir=LR -Tpng output.dot > output.png
#或者
$gprof2dot -n30 output.txt | dot -Grankdir=LR -Tpng > output.png一般来说分为两种情况:一种情况是捕捉系统发出的退出信号;另一种是从第三方进程发来退出协议,例如 GM 管理工具。
但一般有以下几点:
在 Linux 上除了 pgrof 外,还有内存检测工具 valgrind,在编译时需要“-O0 -g”参数,把代码优化等级降低即可
$tar xf valgrind-3.15.0.tar.bz2
$cd valgrind-3.15.0
$./configure
$make
$make install
$valgrind --version使用 valgrind 检测可执行文件
$valgrind ./test_exe其甚至可以找出,像数组访问出界的 bug。在使用 valgrind 时默认的选项是 memcheck,即内存检查,但除了内存检查之外,valgrind 也提供一些其他的功能,可以通过“–tool=tool name”指定其他的工具。
valgrind 也可以生成堆栈
valgrind --tool=callgrind ./test_pd完成之后会发现目录中多了一个名为 callgrind.out.pid
的文件,其中 pid 是进程 ID,每次执行时的进程 ID 是不
一样的,所以每次生成的文件都不一样。生成 PNG 堆栈图的命令如下:
$gprof2dot -f callgrind -n10 -s callgrind.out.`pid` > valgrind.dot
$dot -Grankdir=LR -Tpng valgrind.dot > valgrind.png如果需要查看子线程的调用,在生成 callgrind.out 分析文件时就需要加一个特别的参数“–separate-threads”。
$valgrind --tool=callgrind --separate-threads=yes ./exe每个线程都会生成 callgrind.out
-rw------- 1 root root 0 Dec 19 09:44 callgrind.out.3226
-rw------- 1 root root 807341 Dec 19 09:45 callgrind.out.3226-01
-rw------- 1 root root 460828 Dec 19 09:45 callgrind.out.3226-02
-rw------- 1 root root 24664 Dec 19 09:45 callgrind.out.3226-03
-rw------- 1 root root 227029 Dec 19 09:45 callgrind.out.3226-04
-rw------- 1 root root 227029 Dec 19 09:45 callgrind.out.3226-05valgrind 还可以检查内存泄露。
$valgrind --tool=memcheck --leak-check=full ./exe关于 gprof 与 valgrind,这些我也没了解过,但也正常这是大佬用的东西,我只是个写业务代码的菜鸡而已。
所谓池,一定是众多的。可以这样理解对象池,就是提前生成若干个对象实例并放在池中,在需要时提出,不需要时重新回到池中。对象池的好处在于不需要频繁地创建和销毁对象。
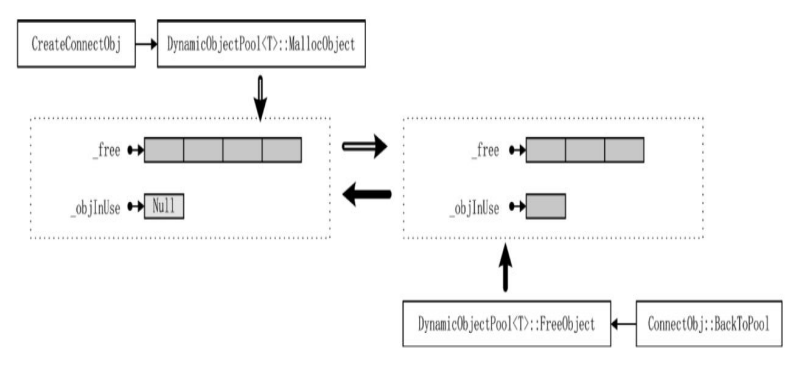
在设计对象池池,也需要思想刷新性数据结构这种设计,可以有效削减对象池各方法的调用瓶颈。可以使用 queue 存储_free,用 CacheRefresh 存储_objInUse。
_objInUse 则有 GetReaderCache、GetAddCache、GetRemoveCache.
对象池 FreeObject 时将指针存入_objInUse 的 RemoveCache.
对象池 MallocObject 时,检查_free 内有没有空余的,没有则 new 一个加入_free,再从_free 中取出一个空闲的,并将指针加入_objInUse 的 AddCache。
对象池 Update 时,检测_objInUse 是否可 Swap 可以则进行 Swap 得到要归还给_free 的指针,然后将返回的指针加入到_free.
对象池这种东西,可以查一下相关的大佬解答或者开源方案等,肯定比自己想的要到位。