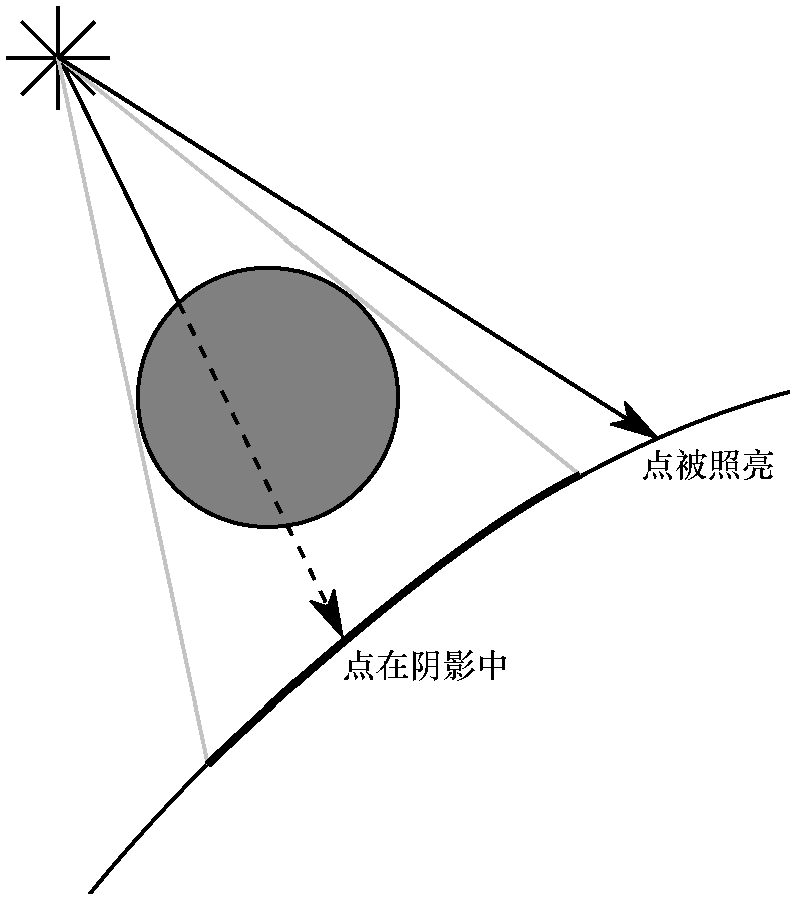
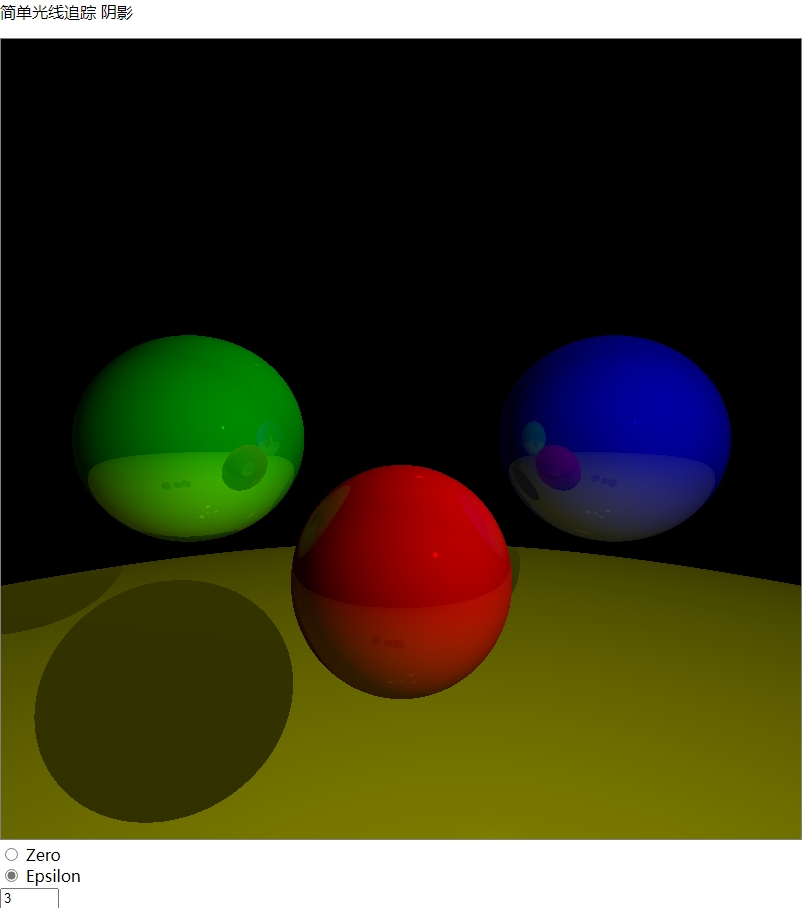
哪里有光和物体,哪里就有阴影。
从L的反方向,即从点P指向光源,检测点P到光源中间有没有物体遮挡。和从相机到视口到P检测同理。
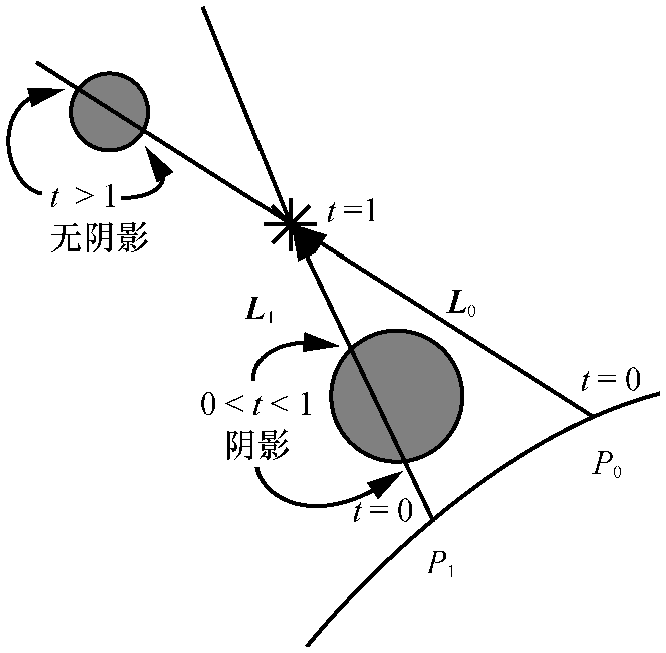
对于点光,则t 为无限趋于0,0 < t < 1, 1为光源。如果t等于0则回检测到点P自己。
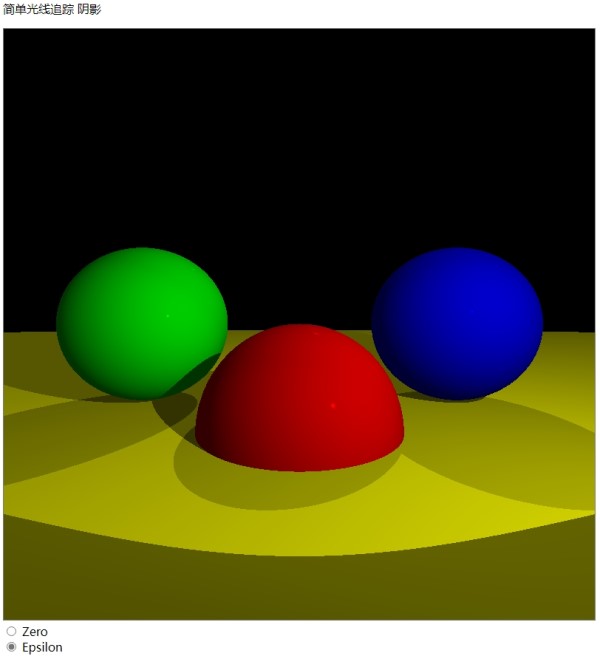
实现效果
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>Document</title>
</head>
<body>
<p>简单光线追踪 阴影</p>
<div class class="centered">
<canvas id="canvas" width=800 height=800 style="border:1px grey solid"></canvas>
</div>
<input type="radio" id="eps-0" name="shadow-ray-start" onClick="SetShadowEpsilon(0);">
<label for='eps-0'>Zero</label><br>
<input type="radio" id="eps-e" name="shadow-ray-start" onClick="SetShadowEpsilon(0.001);" checked>
<label for='eps-e'>Epsilon</label>
</body>
<script>
// 画布
const canvas = document.getElementById("canvas");
let canvas_context = canvas.getContext("2d");
let canvas_buffer = canvas_context.getImageData(0, 0, canvas.width, canvas.height);
console.log(canvas_context);
console.log(canvas_buffer);
// 创建一个新的颜色对象
function Color(r, g, b) {
return {
r, g, b,
mul(n) {
return new Color(this.r * n, this.g * n, this.b * n);
}
};
}
// (x,y) 是以以画布中心为原点,向上为+y,向右为+x的坐标系的点
function PutPixel(x, y, color) {
// console.log({ x, y, color });
// 将(x,y)转换为屏幕坐标系中的点
x = canvas.width / 2 + x;//(x|0)作用是将x转为整数
y = canvas.height / 2 - y - 1;
x = parseInt(x);
y = parseInt(y);
if (x < 0 || x >= canvas.width || y < 0 || y >= canvas.height) {
return;
}
if (x < 0 || x >= canvas.width || y < 0 || y >= canvas.height) {
return;
}
// 像素buffer偏移量
let offset = 4 * (x + canvas_buffer.width * y);//y行+x个
canvas_buffer.data[offset++] = color.r;
canvas_buffer.data[offset++] = color.g;
canvas_buffer.data[offset++] = color.b;
canvas_buffer.data[offset++] = 255; // Alpha = 255 满透明度
}
// 将buffer内容更新到画布上
function UpdateCanvas() {
canvas_context.putImageData(canvas_buffer, 0, 0);
}
// 清除画布内容
function ClearAll() {
canvas.width = canvas.width;
}
// 构造向量对象
function Vec(x, y, z) {
return {
x, y, z,
// 求点积
dot(vec) {
return this.x * vec.x + this.y * vec.y + this.z * vec.z;
},
// 向量相减
sub(vec) {
return new Vec(this.x - vec.x, this.y - vec.y, this.z - vec.z);
},
// 向量相加
add(vec) {
return new Vec(this.x + vec.x, this.y + vec.y, this.z + vec.z);
},
// 向量乘常数n
mul(n) {
return new Vec(this.x * n, this.y * n, this.z * n);
},
// 计算向量长度
length() {
return Math.sqrt(this.dot(this));
}
};
}
// 球体对象
function Sphere(center, radius, color, specular) {
return {
center, // 球心
radius, // 半径
color, // 颜色
specular // 镜面反射指数
};
}
// 光源
function Light(ltype, intensity, position) {
return { ltype, intensity, position };
}
// 光源类型
Light.AMBIENT = 0; // 场景光
Light.POINT = 1; // 点光
Light.DIRECTIONAL = 2; // 方向光
// 场景设置
let EPSILON = 0.001; // 一个无限靠近0的实数
const VIEWPORT_SIZE_X = 2; // 视口大小
const VIEWPORT_SIZE_Y = 2;
const PROJECTION_PLANE_Z = 1; // 视口距离相机的距离 相机朝向+z
const CAMERA_POSITION = new Vec(0, 0, 0); // 相机位置
const BACKGROUND_COLOR = new Color(0, 0, 0); // 画布背景颜色
// 球体
const spheres = [
new Sphere(new Vec(0, -1, 3), 1, new Color(255, 0, 0), 2000),
new Sphere(new Vec(-2, 0, 4), 1, new Color(0, 255, 0), 5000),
new Sphere(new Vec(2, 0, 4), 1, new Color(0, 0, 255), 5000),
new Sphere(new Vec(0, -5001, 0), 5000, new Color(255, 255, 0), 1000)
];
// 场景光源
let lights = [
new Light(Light.AMBIENT, 0.2), // 场景光
new Light(Light.POINT, 0.6, new Vec(2, 1, 0)),
new Light(Light.DIRECTIONAL, 0.2, new Vec(1, 4, 4))
];
// 画布坐标到视口坐标的转换
function CanvasToViewport(x, y) {
return new Vec(
x * (VIEWPORT_SIZE_X / canvas.width),
y * (VIEWPORT_SIZE_Y / canvas.height),
PROJECTION_PLANE_Z // 视口平面的坐标z值为PROJECTION_PLANE_Z
);
}
// origin: 射线原点
// direction: 射线方向
// sphere: 球体
function IntersectRaySphere(origin, direction, sphere) {
// 球体方程 (P-C)*(P-C) = r^2 P为球面上一点 C为球心 r为球体半径
// 射线上一点 P = O + tD O为射线原点 D为方向
// 二者方程组可以把P消掉, 可以求解t
// (O+tD-C)*(O+tD-C)=r ^ 2
// CO*CO + tD*CO + CO*tD + tD*tD = r^2
// tD*tD + 2CO*tD + CO*CO = r^2
// t^2 (D*D) + 2t(CO * D) + CO * CO - r^2 = 0
// 一元二次方程一般形式 ax^2+bx+c=0(a!=0)
// 解为 {t1,t2} = ( -b (+-) sqrt(b^2-4ac) ) / 2a
// t<0 在相机后面
// 0<=t<=1 在相机和视口间
// t>1 在视口前
let co = origin.sub(sphere.center);
let a = direction.dot(direction);
let b = 2 * co.dot(direction);
let c = co.dot(co) - sphere.radius * sphere.radius;
// 解个数判别式
let discriminant = b * b - 4 * a * c;
if (discriminant < 0) {
return [Infinity, Infinity]; // 无解
}
let t1 = (-b + Math.sqrt(discriminant)) / (2 * a);
let t2 = (-b - Math.sqrt(discriminant)) / (2 * a);
return [t1, t2];
}
function ComputeLighting(point, normal, view, specular) {
let intensity = 0;
let length_n = normal.length(); // 必须为1
let length_v = view.length();
// 遍历所有光源
for (let i = 0; i < lights.length; i++) {
let light = lights[i];
if (light.ltype == Light.AMBIENT) { // 环境光
intensity += light.intensity;
continue;
}
let vec_l, t_max; // vec_l 为场景点P到光源向量 t_max为阴影检测最大范围
if (light.ltype == Light.POINT) {
vec_l = light.position.sub(point);
t_max = 1.0; // 点光则阴影最大检查点P到光源即1
} else { // Light.DIRECTIONAL
vec_l = light.position;
t_max = Infinity; // 方向光则阴影最大检查点P到光源即无限远
}
// 阴影检测
let blocker = ClosestIntersection(point, vec_l, EPSILON, t_max);
if (blocker) {
continue; // 光源到点P之间有物体
}
// 漫反射
let n_dot_l = normal.dot(vec_l);
if (n_dot_l > 0) {
intensity += light.intensity * n_dot_l / (length_n * vec_l.length());
}
// 镜面反射
if (specular != -1) { // -1表示为哑光不参与镜面反射计算
let vec_r = normal.mul(2.0 * n_dot_l).sub(vec_l);
let r_dot_v = vec_r.dot(view);
if (r_dot_v > 0) {
intensity += light.intensity * Math.pow(r_dot_v / (vec_r.length() * length_v), specular);
}
}
}
return intensity;
}
// 找从点origin到方向direction发出射线最先相交的球 射线检测范围min_t到max_t
function ClosestIntersection(origin, direction, min_t, max_t) {
let closest_t = Infinity; // 最近距离
let closest_sphere = null; // 最近的球体
// 遍历所有球体
for (let i = 0; i < spheres.length; i++) {
let ts = IntersectRaySphere(origin, direction, spheres[i]);
// 求射线与球体相交的解 最多可能有两个解 哪个近用哪个
if (ts[0] < closest_t && min_t < ts[0] && ts[0] < max_t) {
closest_t = ts[0];
closest_sphere = spheres[i];
}
if (ts[1] < closest_t && min_t < ts[1] && ts[1] < max_t) {
closest_t = ts[1];
closest_sphere = spheres[i];
}
}
// 射线没和任何球体相交则返回背景色
if (closest_sphere == null) {
return null;
}
return [closest_sphere, closest_t];
}
// 从原点朝direction射出射线
function TraceRay(origin, direction, min_t, max_t) {
// 找从相机到视口发出射线最先相交的球
let intersection = ClosestIntersection(origin, direction, min_t, max_t);
if (!intersection) { // 无解则返回背景色
return BACKGROUND_COLOR;
}
let closest_sphere = intersection[0]; // 最先相交的球体
let closest_t = intersection[1]; // 最先相交点P的长度 用direction倍数表示
let point = origin.add(direction.mul(closest_t)); // 射线与场景球体表面交点P
let normal = point.sub(closest_sphere.center); // 球体表面点P的法线
normal = normal.mul(1.0 / normal.length()); // 归一化
let view = direction.mul(-1); // V与射线方向相反
let lighting = ComputeLighting(point, normal, view, closest_sphere.specular);
// 否则返回球体颜色
return closest_sphere.color.mul(lighting); // 光越强颜色倍数越高
}
function SetShadowEpsilon(epsilon) {
EPSILON = epsilon;
Render();
}
function Render() {
ClearAll();
setTimeout(() => {
// 从相机位置朝向视口平面上的每个点发出射线 追踪从哪里射进来光源
for (let x = -canvas.width / 2; x < canvas.width / 2; x++) {
for (let y = -canvas.height / 2; y < canvas.height / 2; y++) {
let direction = CanvasToViewport(x, y);
let color = TraceRay(CAMERA_POSITION, direction, Math.sqrt(direction.dot(direction)), Infinity); // 1到无限远
PutPixel(x, y, color);
}
}
UpdateCanvas(); // 刷新缓冲到画布
}, 0);
}
Render();
</script>
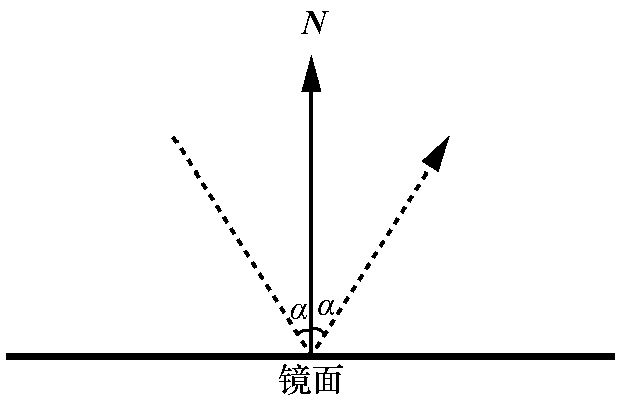
</html>在主循环中,对于每个像素,我们创建一条从相机到场景的光线,并调用TraceRay来确定相机在该方向“看到”的颜色。如果TraceRay确定相机看到的是一面镜子,它只需要计算被反射的光线的方向,并计算出来自那个方向的光线的颜色。它必须调用它本身(指的是递归调用)。
设计递归算法(自己调用自己的算法)时,我们需要确保不会导致无限循环(“此程序已停止响应。你想终止它吗?”)。该算法有两个自然退出条件:当射线“击中”非反射物体时和当它没有“击中”任何物体时。但有一个简单的例子,我们可能被困在一个无限循环中:德罗斯特效应(Droste effect)。这就是当你把一面镜子放在另一面镜子前,然后看着它的时候会发生的事情——无穷无尽的自我复制品!
在递归算法,总引入递归极限 recursion limit,递归深度,r=0时能看到物体但没反射效果,r=1可以看到物体以及其他物体在其上的反射,r=2,会看到物体,一些物体的反射以及一些物体反射的反射。等等。
实现效果
代码实现
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>Document</title>
</head>
<body>
<p>简单光线追踪 反射</p>
<div class class="centered">
<canvas id="canvas" width=800 height=800 style="border:1px grey solid"></canvas>
</div>
<input type="radio" id="eps-0" name="shadow-ray-start" onClick="SetShadowEpsilon(0);">
<label for='eps-0'>Zero</label><br>
<input type="radio" id="eps-e" name="shadow-ray-start" onClick="SetShadowEpsilon(0.001);" checked>
<label for='eps-e'>Epsilon</label>
<br>
<input type="number" id="rec-limit" onchange="UpdateRecursionLimit();" min="0" max="5" witdh="3" value="3">
</body>
<script>
// 画布
const canvas = document.getElementById("canvas");
let canvas_context = canvas.getContext("2d");
let canvas_buffer = canvas_context.getImageData(0, 0, canvas.width, canvas.height);
console.log(canvas_context);
console.log(canvas_buffer);
// 创建一个新的颜色对象
function Color(r, g, b) {
return {
r, g, b,
mul(n) {
return new Color(this.r * n, this.g * n, this.b * n);
},
add(color) {
return new Color(this.r + color.r, this.g + color.g, this.b + color.b)
}
};
}
// (x,y) 是以以画布中心为原点,向上为+y,向右为+x的坐标系的点
function PutPixel(x, y, color) {
// console.log({ x, y, color });
// 将(x,y)转换为屏幕坐标系中的点
x = canvas.width / 2 + x;//(x|0)作用是将x转为整数
y = canvas.height / 2 - y - 1;
x = parseInt(x);
y = parseInt(y);
if (x < 0 || x >= canvas.width || y < 0 || y >= canvas.height) {
return;
}
if (x < 0 || x >= canvas.width || y < 0 || y >= canvas.height) {
return;
}
// 像素buffer偏移量
let offset = 4 * (x + canvas_buffer.width * y);//y行+x个
canvas_buffer.data[offset++] = color.r;
canvas_buffer.data[offset++] = color.g;
canvas_buffer.data[offset++] = color.b;
canvas_buffer.data[offset++] = 255; // Alpha = 255 满透明度
}
// 将buffer内容更新到画布上
function UpdateCanvas() {
canvas_context.putImageData(canvas_buffer, 0, 0);
}
// 清除画布内容
function ClearAll() {
canvas.width = canvas.width;
}
// 构造向量对象
function Vec(x, y, z) {
return {
x, y, z,
// 求点积
dot(vec) {
return this.x * vec.x + this.y * vec.y + this.z * vec.z;
},
// 向量相减
sub(vec) {
return new Vec(this.x - vec.x, this.y - vec.y, this.z - vec.z);
},
// 向量相加
add(vec) {
return new Vec(this.x + vec.x, this.y + vec.y, this.z + vec.z);
},
// 向量乘常数n
mul(n) {
return new Vec(this.x * n, this.y * n, this.z * n);
},
// 计算向量长度
length() {
return Math.sqrt(this.dot(this));
}
};
}
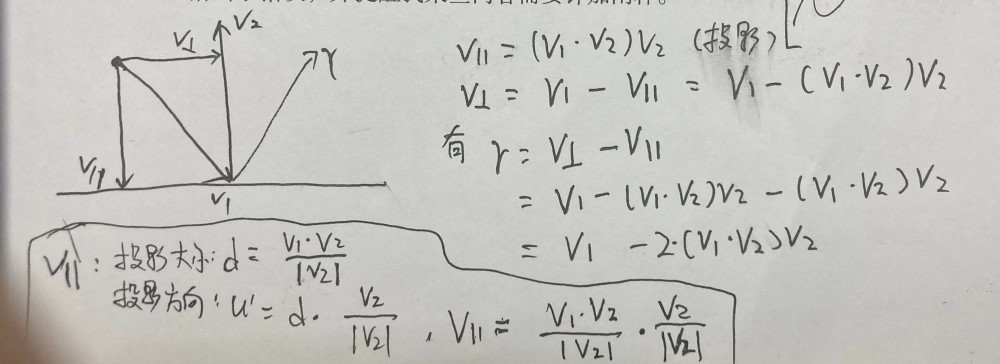
// 求 v1相对v2的反射向量 v2必须为单位向量
function ReflectRay(v1, v2) {
return v2.mul(2 * v1.dot(v2)).sub(v1);
}
// 球体对象
function Sphere(center, radius, color, specular, reflective) {
return {
center, // 球心
radius, // 半径
color, // 颜色
specular, // 镜面反射指数 会形成光泽 可以区分哑光与镜面材质
reflective // 表面反射程度
};
}
// 光源
function Light(ltype, intensity, position) {
return { ltype, intensity, position };
}
// 光源类型
Light.AMBIENT = 0; // 场景光
Light.POINT = 1; // 点光
Light.DIRECTIONAL = 2; // 方向光
// 场景设置
let EPSILON = 0.001; // 一个无限靠近0的实数
let RECURSION_DEPTH = 3; // 反射递归深度
const VIEWPORT_SIZE_X = 2; // 视口大小
const VIEWPORT_SIZE_Y = 2
const PROJECTION_PLANE_Z = 1; // 视口距离相机的距离 相机朝向+z
const CAMERA_POSITION = new Vec(0, 0, 0); // 相机位置
const BACKGROUND_COLOR = new Color(0, 0, 0); // 画布背景颜色
// 球体
const spheres = [
new Sphere(new Vec(0, -1, 3), 0.8, new Color(255, 0, 0), 2000, 0.2),
new Sphere(new Vec(-2, 0, 4), 1, new Color(0, 255, 0), 5000, 0.4),
new Sphere(new Vec(2, 0, 4), 1, new Color(0, 0, 255), 5000, 0.3),
new Sphere(new Vec(0, -310, 0), 300, new Color(255, 255, 0), 1000, 0.5)
];
// 场景光源
let lights = [
new Light(Light.AMBIENT, 0.1), // 场景光
new Light(Light.POINT, 0.8, new Vec(2, 1, 0)),
new Light(Light.DIRECTIONAL, 0.4, new Vec(1, 4, 4))
];
// 画布坐标到视口坐标的转换
function CanvasToViewport(x, y) {
return new Vec(
x * (VIEWPORT_SIZE_X / canvas.width),
y * (VIEWPORT_SIZE_Y / canvas.height),
PROJECTION_PLANE_Z // 视口平面的坐标z值为PROJECTION_PLANE_Z
);
}
// origin: 射线原点
// direction: 射线方向
// sphere: 球体
function IntersectRaySphere(origin, direction, sphere) {
// 球体方程 (P-C)*(P-C) = r^2 P为球面上一点 C为球心 r为球体半径
// 射线上一点 P = O + tD O为射线原点 D为方向
// 二者方程组可以把P消掉, 可以求解t
// (O+tD-C)*(O+tD-C)=r ^ 2
// CO*CO + tD*CO + CO*tD + tD*tD = r^2
// tD*tD + 2CO*tD + CO*CO = r^2
// t^2 (D*D) + 2t(CO * D) + CO * CO - r^2 = 0
// 一元二次方程一般形式 ax^2+bx+c=0(a!=0)
// 解为 {t1,t2} = ( -b (+-) sqrt(b^2-4ac) ) / 2a
// t<0 在相机后面
// 0<=t<=1 在相机和视口间
// t>1 在视口前
let co = origin.sub(sphere.center);
let a = direction.dot(direction);
let b = 2 * co.dot(direction);
let c = co.dot(co) - sphere.radius * sphere.radius;
// 解个数判别式
let discriminant = b * b - 4 * a * c;
if (discriminant < 0) {
return [Infinity, Infinity]; // 无解
}
let t1 = (-b + Math.sqrt(discriminant)) / (2 * a);
let t2 = (-b - Math.sqrt(discriminant)) / (2 * a);
return [t1, t2];
}
function ComputeLighting(point, normal, view, specular) {
let intensity = 0;
let length_n = normal.length(); // 必须为1
let length_v = view.length();
// 遍历所有光源
for (let i = 0; i < lights.length; i++) {
let light = lights[i];
if (light.ltype == Light.AMBIENT) { // 环境光
intensity += light.intensity;
continue;
}
let vec_l, t_max; // vec_l 为场景点P到光源向量 t_max为阴影检测最大范围
if (light.ltype == Light.POINT) {
vec_l = light.position.sub(point);
t_max = 1.0; // 点光则阴影最大检查点P到光源即1
} else { // Light.DIRECTIONAL
vec_l = light.position;
t_max = Infinity; // 方向光则阴影最大检查点P到光源即无限远
}
// 阴影检测
let blocker = ClosestIntersection(point, vec_l, EPSILON, t_max);
if (blocker) {
continue; // 光源到点P之间有物体
}
// 漫反射
let n_dot_l = normal.dot(vec_l);
if (n_dot_l > 0) {
intensity += light.intensity * n_dot_l / (length_n * vec_l.length());
}
// 镜面反射
if (specular != -1) { // -1表示为哑光不参与镜面反射计算
let vec_r = normal.mul(2.0 * n_dot_l).sub(vec_l);
let r_dot_v = vec_r.dot(view);
if (r_dot_v > 0) {
intensity += light.intensity * Math.pow(r_dot_v / (vec_r.length() * length_v), specular);
}
}
}
return intensity;
}
// 找从点origin到方向direction发出射线最先相交的球 射线检测范围min_t到max_t
function ClosestIntersection(origin, direction, min_t, max_t) {
let closest_t = Infinity; // 最近距离
let closest_sphere = null; // 最近的球体
// 遍历所有球体
for (let i = 0; i < spheres.length; i++) {
let ts = IntersectRaySphere(origin, direction, spheres[i]);
// 求射线与球体相交的解 最多可能有两个解 哪个近用哪个
if (ts[0] < closest_t && min_t < ts[0] && ts[0] < max_t) {
closest_t = ts[0];
closest_sphere = spheres[i];
}
if (ts[1] < closest_t && min_t < ts[1] && ts[1] < max_t) {
closest_t = ts[1];
closest_sphere = spheres[i];
}
}
// 射线没和任何球体相交则返回背景色
if (closest_sphere == null) {
return null;
}
return [closest_sphere, closest_t];
}
// 从原点朝direction射出射线
function TraceRay(origin, direction, min_t, max_t, depth) {
// 找从相机到视口发出射线最先相交的球
let intersection = ClosestIntersection(origin, direction, min_t, max_t);
if (!intersection) { // 无解则返回背景色
return BACKGROUND_COLOR;
}
let closest_sphere = intersection[0]; // 最先相交的球体
let closest_t = intersection[1]; // 最先相交点P的长度 用direction倍数表示
let point = origin.add(direction.mul(closest_t)); // 射线与场景球体表面交点P
let normal = point.sub(closest_sphere.center); // 球体表面点P的法线
normal = normal.mul(1.0 / normal.length()); // 归一化
let view = direction.mul(-1); // V与射线方向相反
let lighting = ComputeLighting(point, normal, view, closest_sphere.specular);
let point_local_color = closest_sphere.color.mul(lighting); // 点P本身颜色
if (closest_sphere.reflective <= 0 || depth <= 0) { // 递归出口
return point_local_color; // 球材质不参与反射
}
let reflected_ray = ReflectRay(view, normal); // view根据normal的对称向量
let reflected_color = TraceRay(point, reflected_ray, EPSILON, Infinity, depth - 1);
// 相当于相机在P点朝向view反向的反射方向再次光线追踪
let local_contribution = point_local_color.mul(1 - closest_sphere.reflective); // P点本身的部分
let reflected_contribution = reflected_color.mul(closest_sphere.reflective); // 反射到P点的部分
return local_contribution.add(reflected_contribution);
}
function SetShadowEpsilon(epsilon) {
EPSILON = epsilon;
Render();
}
function UpdateRecursionLimit() {
let v = document.getElementById("rec-limit").value | 0; // 取整
if (v < 0) {
v = 0;
}
if (v > 5) {
v = 5;
}
document.getElementById("rec-limit").value = v;
if (RECURSION_DEPTH != v) {
RECURSION_DEPTH = v;
Render();
}
}
function Render() {
ClearAll();
setTimeout(() => {
// 从相机位置朝向视口平面上的每个点发出射线 追踪从哪里射进来光源
for (let x = -canvas.width / 2; x < canvas.width / 2; x++) {
for (let y = -canvas.height / 2; y < canvas.height / 2; y++) {
let direction = CanvasToViewport(x, y);
let color = TraceRay(CAMERA_POSITION,
direction,
Math.sqrt(direction.dot(direction)),
Infinity,
RECURSION_DEPTH); // 1到无限远
PutPixel(x, y, color);
}
}
UpdateCanvas(); // 刷新缓冲到画布
}, 0);
}
Render();
</script>
</html>